













Федеральное агентство по образованию
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
/ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ/
«МАИ»
Кафедра 106
Курсовая работа
по управлению движением технической системы
на тему:
Синтез системы управления и анализ её характеристик
![]() Консультант:
Н.Н.Маркин
Консультант:
Н.Н.Маркин
Исполнитель:
![]() Студент группы 01-314 И.Я.Филиппов
Студент группы 01-314 И.Я.Филиппов
Москва 2009
Задание
1.Характеристика объекта управления и его параметры
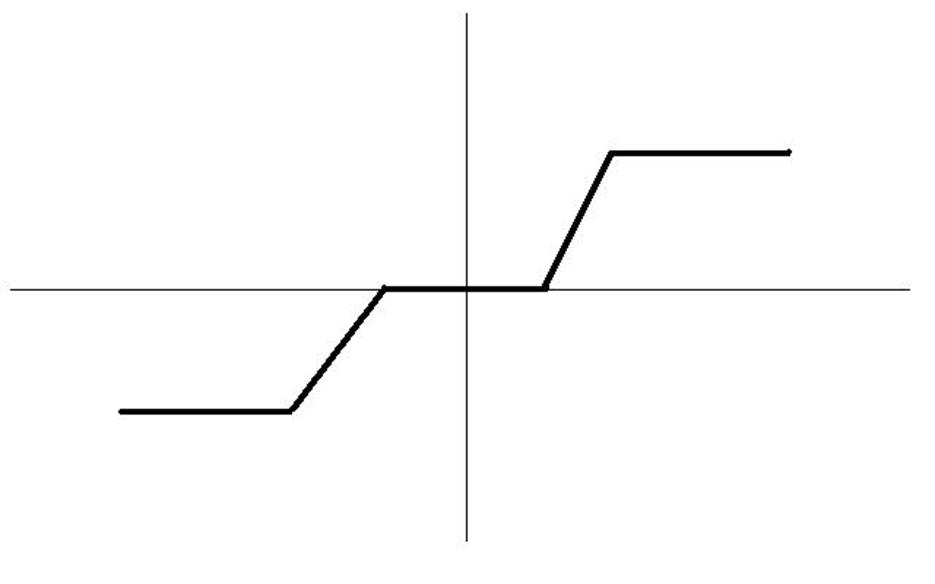
Для синтеза систем управления нелинейность заменяется условным звеном с коэффициентом усиления равным единице, после синтеза системы исследуется влияние параметров нелинейности на возникновение автоколебаний и характеристики переходного процесса.
Требуемое корректирующее звено - корректирующее звено в прямой цепи.
Желаемая ЛАФЧХ – статическая.
![]()
![]()
![]()
![]()
Теоретическая часть
Определение параметров корректирующего звена при использовании метода последовательной коррекции.
При известной функции неизменяемой части системы ставится задача определить передаточную функцию последовательного корректирующего звена так чтобы ЛАФЧХ разомкнутой системы была бы равна желаемой.
Для построения желаемой ЛАФЧХ выбирается опорная точка в
которой значение ЛАЧХ равно ![]() запаса по амплитуде,
что составляет от 6-ти до 12-ти дб.
запаса по амплитуде,
что составляет от 6-ти до 12-ти дб.
Через опорную точку проводится желаемая ЛАЧХ под углом -20дб/дек до пересечения с ЛАЧХ неизменяемой ч-ти и в точке пересечения определяется частота начала коррекции.
ЛАЧХ корректируется в диапазоне частот от ![]() до
до ![]() .Поэтому
последовательное
.Поэтому
последовательное
корректирующее звено рассматривается как корректирующий фильтр интервала частот
от ![]() до
до ![]() .
.
Желаемая ЛАЧХ будет линейно фазовой т.к. пересекает ось частот под углом -20дб/дек как апериодическое звено.
Использование корректирующего звена приводит к уменьшению полосы пропускания системы и уменьшению частоты среза.
Чем больше запас по амплитуде в узле коррекции ![]() тем меньше полоса пропускания.
тем меньше полоса пропускания.
ЛАЧХ корректирующего звена вычисляется по разности ЛАЧХ желаемой и неизменяемой части.
Wgel=Wkor*Wnch;
20lgWkor=20lgWgel-20lgWnch
Комментарий к практическому использованию метода последовательной коррекции.
1 Передаточная функция корректирующего звена определяется аналитически только на основе применения в расчетах асимптотических ЛАЧХ.
2 Значение запаса по фазе при выполнении расчетов не
контролируется, поэтому после построения ЛАЧХ разомкнутой системы может
потребоваться изменение интервала частот ![]() -
-![]() , в сторону увеличения
, в сторону увеличения ![]() сделать больше, а
сделать больше, а ![]() меньше.
меньше.
3 Если передаточная функция неизменяемой части и ее ЛАЧХ определяется численно(MATLAB) ,то в этом случае используется два подхода:
1 ЛАЧХ неизменяемой части апроксимируется кусочно-линейной зависимостью и аналитически определяются узловые частоты и передаточная функция корректирующего звена.
2 Задаются параметры корректирующего фильтра T1 T2 Tk и подбираются необходимые значения для обеспечения требуемых запасов по амплитуде и по фазе.
Практическая часть
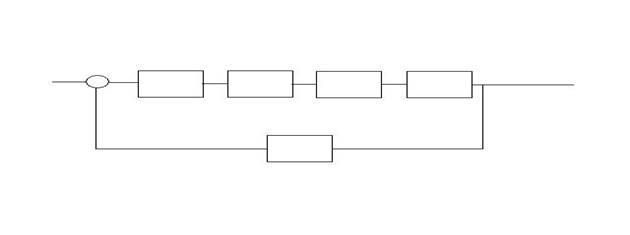
Построение системы из исходных параметров
>> wc=tf([1],[0.8^2 2*0.5*0.8 1]);
>> wpr=tf([1],[0.04^2 2*0.6*0.04 1]);
>> wraz=wc*wpr;
>> wzam =wraz /(1+wraz);
>> wpo_oshibke=1-wzam;
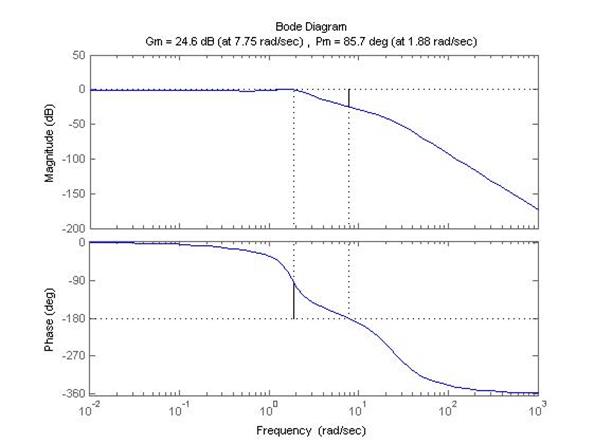
Введение к-та усиления
>> Kc=6;
>> wraz_Kc=wraz*Kc;
>> wzam =wraz_Kc /(1+wraz_Kc);
>> wpo_oshibke_Kc=1-wzam_Kc;
Коррекция (по методу последовательной коррекции)
>> T1=1/0.349;
>> T2=1/5.15;
>> Tk=1/1.5;
>> wkor1=tf([Tk 1],[T1 1]);
>> wkor2=tf([Tk 1],[T2 1]);
>> wkor=wkor1*wkor2;
>> wgel=wkor*wraz_Kc;
>> wzam_gel=wgel/(1+wgel);
>> wpo_oshibke_gel=1-wzam_gel;
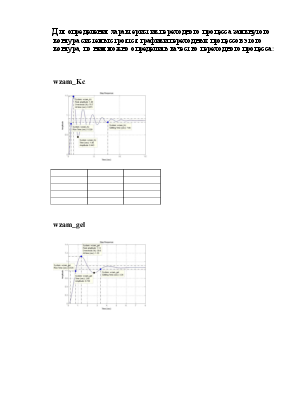
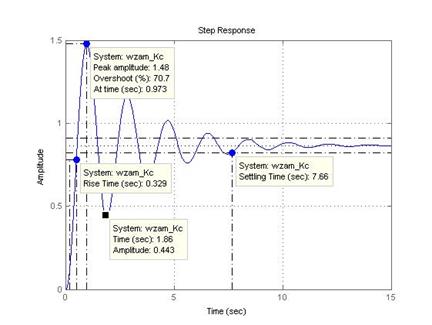
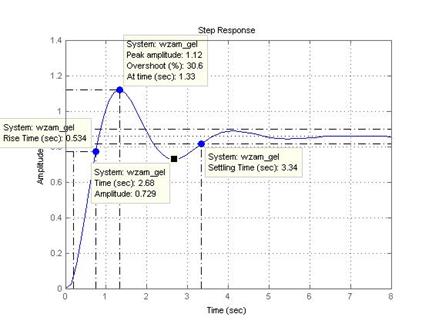
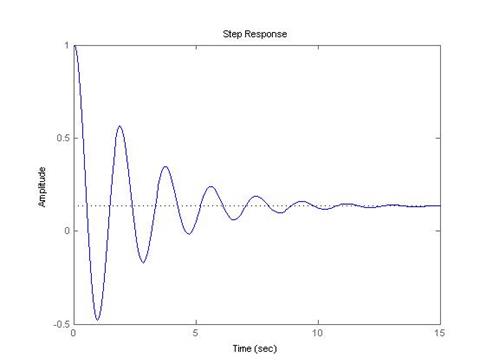
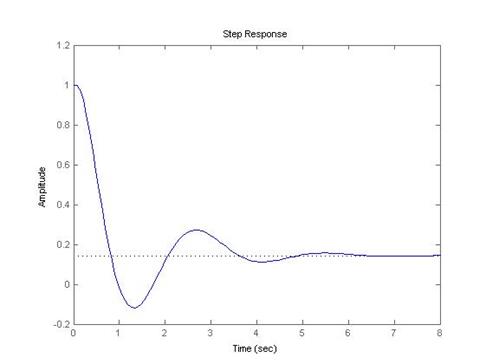
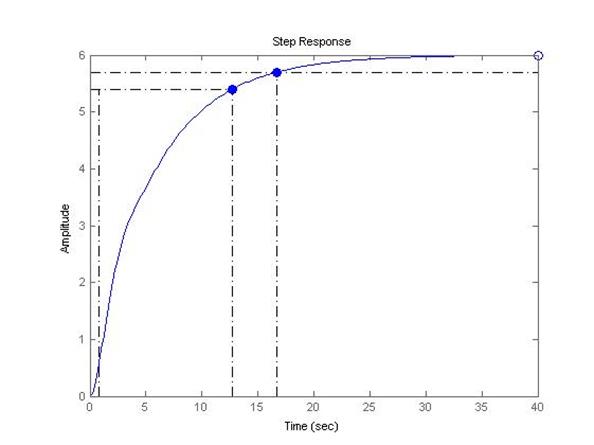
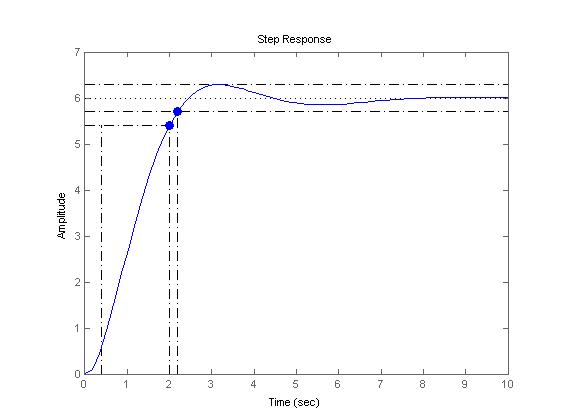
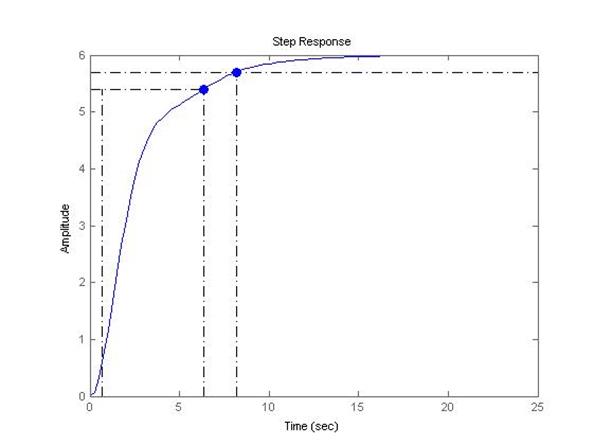
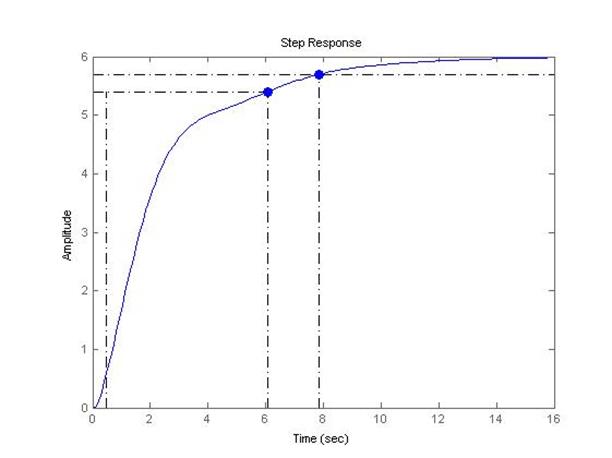
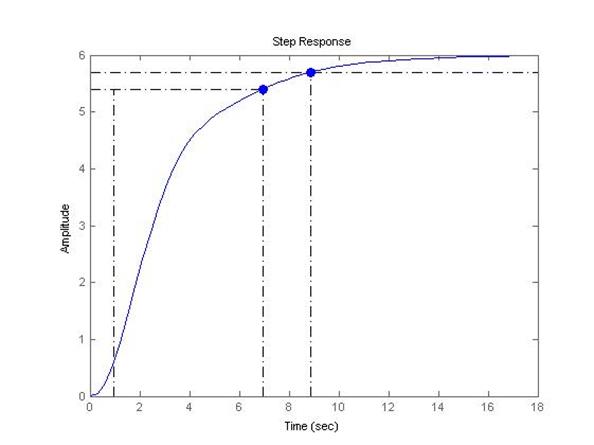
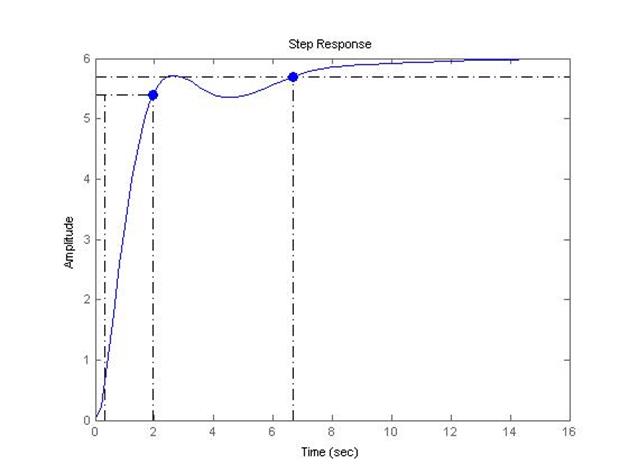
Для определения характеристик переходного процесса замкнутого контура системы строятся графики переходных процессов этого контура, по ним можно определить качество переходного процесса:
wzam_Kc
wzam_gel
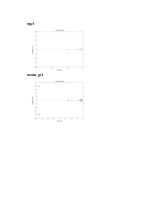
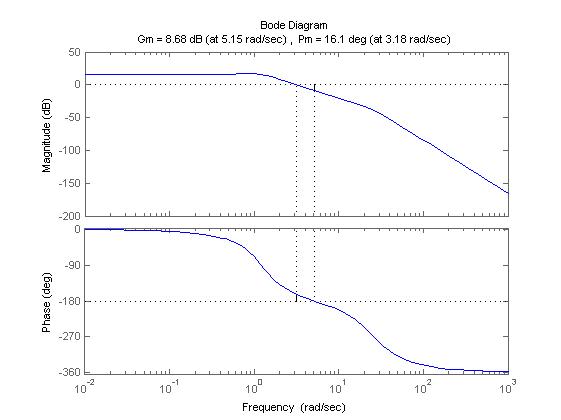
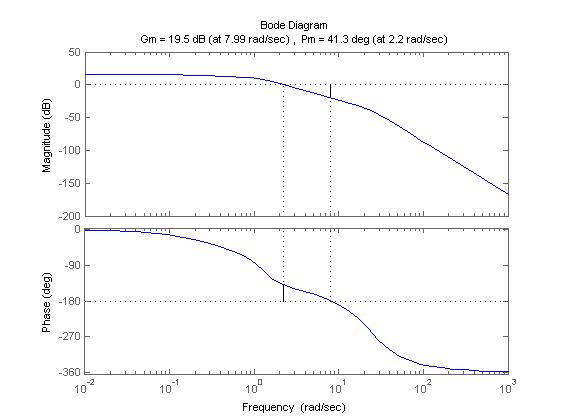
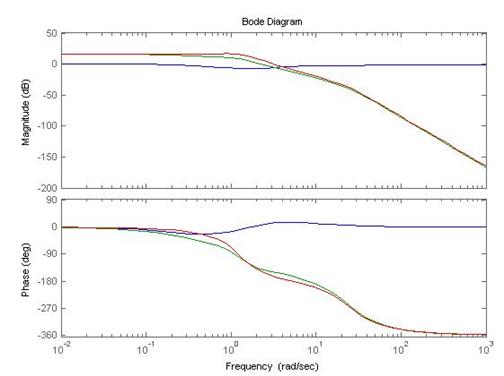
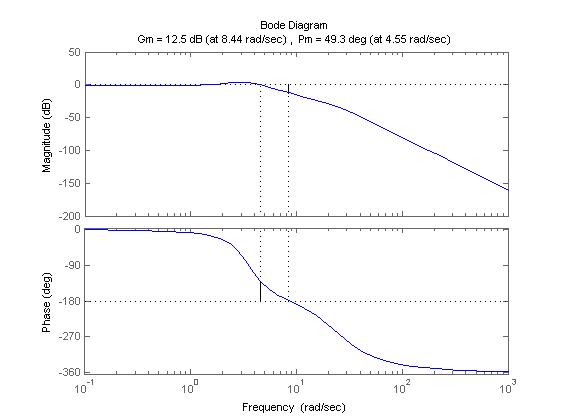
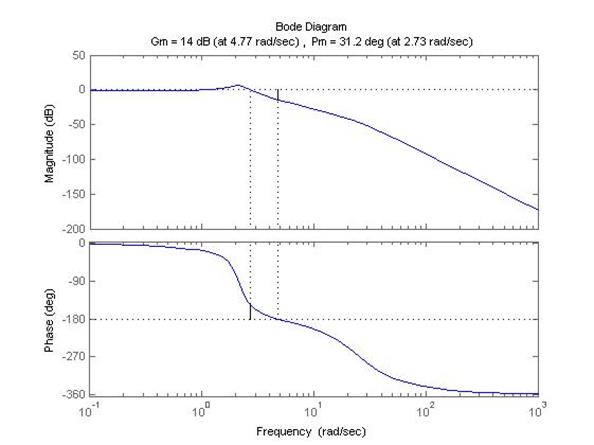
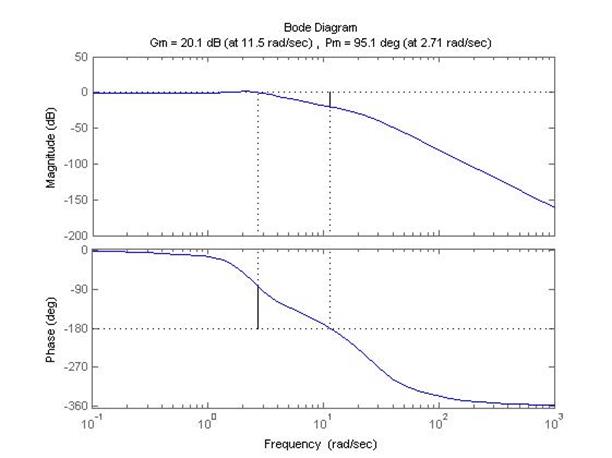
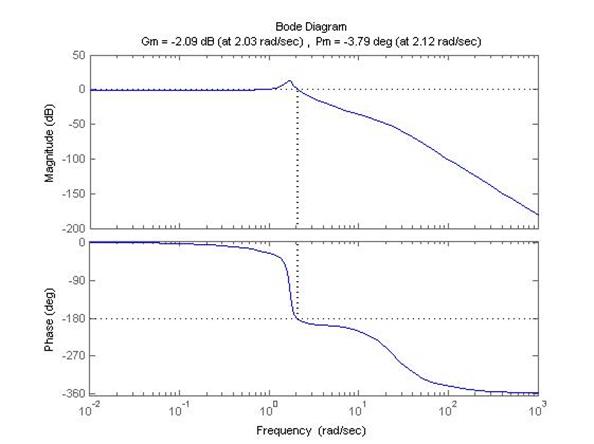
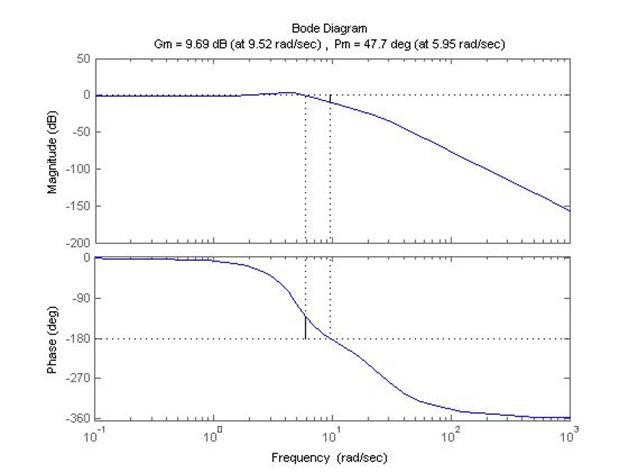
Для определения запасов по амплитуде и по фазе строятся ЛАФЧХ для разомкнутой функции разомкнутой системы:
wraz_Kc
wgel
wraz_Kc_wkor_wgel
Для определения
рассогласования в блоке суммирования, где из входного сигнала вычитается сигнал
обратного контура ![]() , для этого строятся графики
переходных процессов по ошибке:
, для этого строятся графики
переходных процессов по ошибке:
wpo_oshibke_Kc
wpo_oshibke_gel
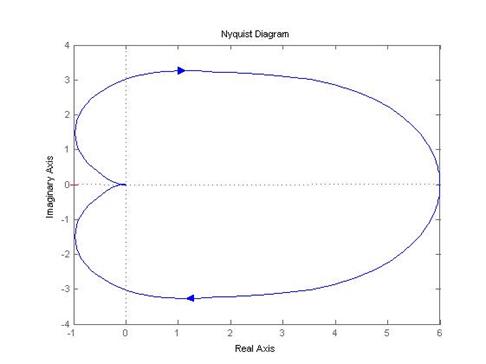
Для определения устойчивости замкнутой функции строится годограф разомкнутой функции:
wraz_Kc
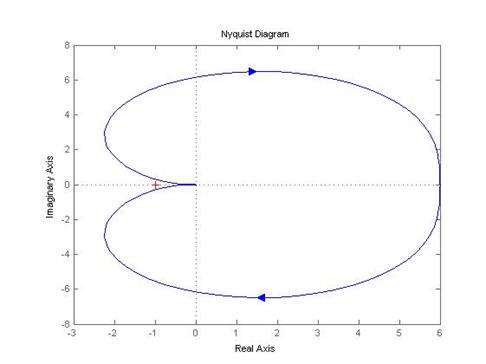
wgel
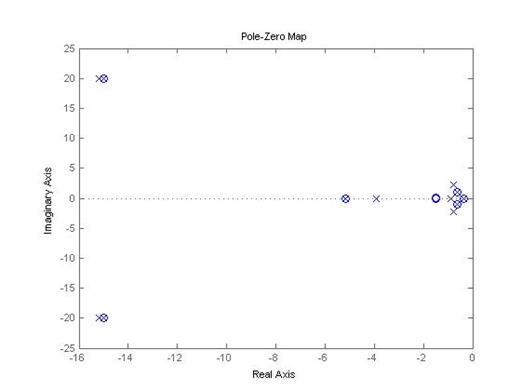
Графики для сравнения корней и полюсов разомкнутых и замкнутых функций(по ним так же можне судить об устойчивости системы):
wraz_Kc
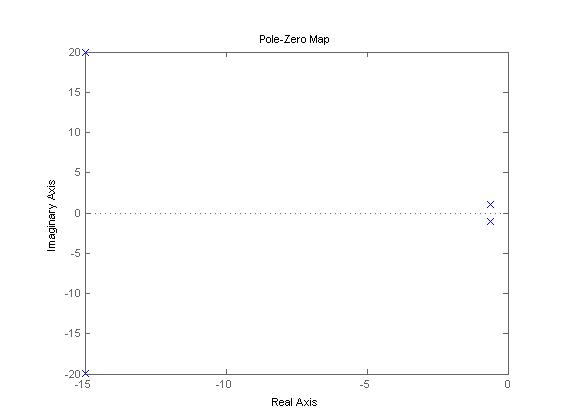
wzam_Kc
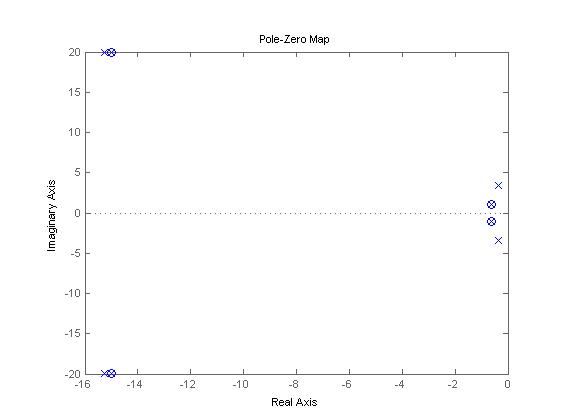
wgel
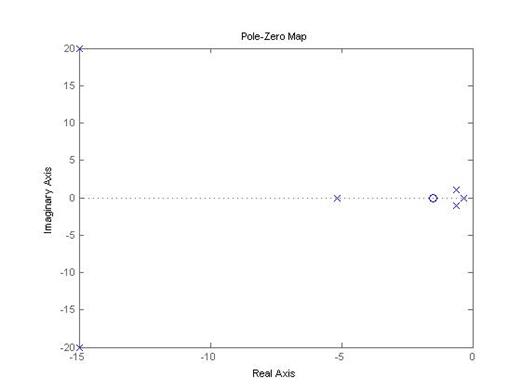
wzam_gel
Исследование влияния нелинейности на систему управления при импульсном воздействии
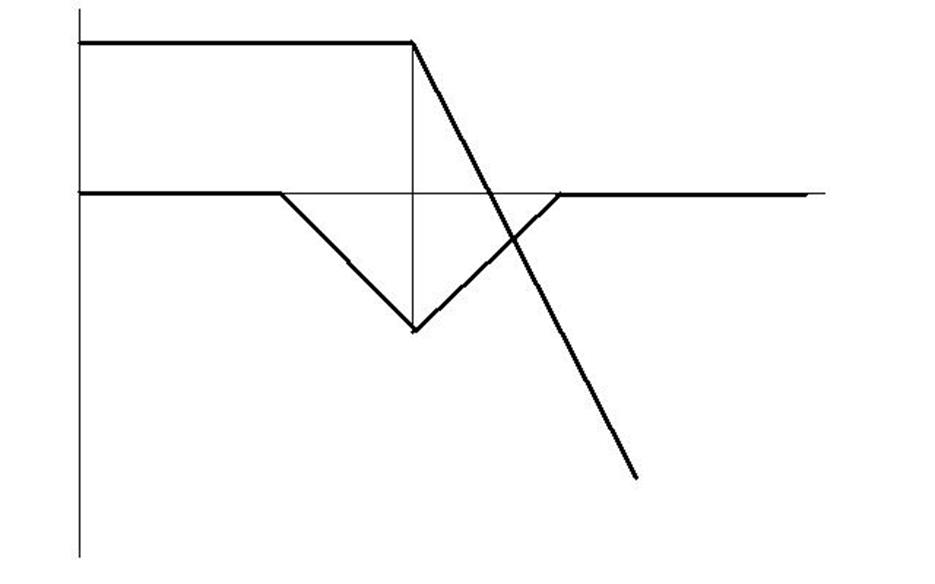
1.Изменение наклона нелинейности:
При увеличении наклона увеличивается заброс по амплитуде, при уменьшении наклона процесс имеет меньшую колебательность и меньшие значения амплитуды. На время затухания этот параметр не влияет.
2.Изменение верхней границы:
Это изменение влияет на колебательность. При больших значениях границы повышается значения амплитуды на первой волне и слишком маленькие значения границы ведут к повышению амплитуды на второй волне.
3.Изменение зоны нечувствительности:
Чем меньше зона нечувствительности тем меньше значения амплитуды в течении затухания.
Влияние к-тов корректирующего звена:
2T1
0.5T1
2T2
0.5T2
0.3Tk
1.2Tk
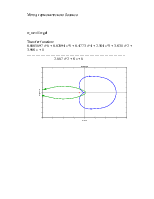
Метод гармонического баланса
w_ne=1/wgel
Transfer function:
0.0005697 s^6 + 0.02094 s^5 + 0.4773 s^4 + 2.584 s^3 + 3.831 s^2 + 3.908 s + 1
------------------------------------------------------------------------------
2.667 s^2 + 8 s + 6
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.