В приложении А представлена принципиальная схема системы ввода изображений мазка крови.
Из условия технического задания нам известно, что команды с персонального компьютера (ПК) поступают на микроконтроллер (МК) ATmega8L, далее в зависимости от команды поступившей с ПК микроконтроллер вырабатывает управляющие воздействия.
За передвижение координатного столика микроскопа в горизонтальной плоскости отвечают двигатели X и Y(рисунок 3.1). При поступлении сигнала с компьютера микроконтроллер снимает данные о расположении предметного столика с датчиков 1 и 2. Сигналы с датчиков оцифровываются аналого-цифровым преобразователем (АЦП) AD7706. датчики подключаются к АЦП. Микроконтроллер сравнивает сигналы с датчиков и компьютера и выдает управляющие воздействия на двигатели. Когда значения сигналов с ПК равны значениям с датчиков, МК переходит в режим ожидания.
Настройка яркости изображения производится светодиодом, подключенным к выходу широтно-импульсной модуляции микроконтроллера через полевой транзистор. Увеличить или уменьшить яркость также определяет программа, обрабатывающая изображение.
Электродвигатель ДИД – 0.5У.
Двигатели серии ДИД имеют полный немагнитный ротор. Сдвиг фаз напряжения обмотки управления относительно напряжения обмотки возбуждения, равный 90о, осуществляется с помощью специальных схем независимо от нагрузки двигателя. Соединение с нагрузкой осуществляется с помощью трубки (ДИД – 0,1 , ДИД – 0,5 , ДИД – 0,6) либо муфты или шестерни. Не допускается непосредственное соединение вала с нагрузкой, создающей осевое усилие. Крепление двигателей – фланцевое. Режим работы – продолжительный. Напряжение питания обмоток возбуждения и управления 36В, частота напряжения питания 400Гц. Основные характеристики двигателя приведены в таблице 5.1 [6]
Таблица 5.1
|
Р2 мах, Вт |
Мп, 10-3 Н*м |
no, об/мин |
IП, В, А |
IП, У, А |
Uтр, В |
τм, с |
КПД, % |
Jр,10-6 кг*м2 |
Zу, Ом |
Zв, Ом |
|
0,4 |
0,686 |
14000 |
0,09 |
0,15 |
0,4 |
0,11 |
8 |
0,0055 |
169+ j158 |
307+ j342 |
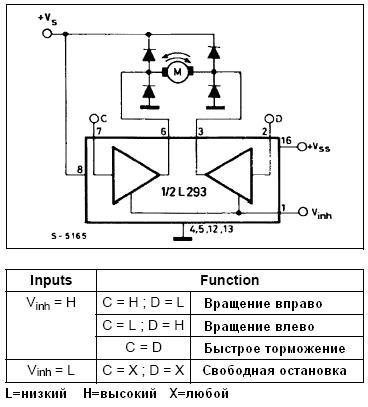
Рисунок 5.1
На рисунке 5.1 изображена схема подключения АД к микросхеме L293. Такое подключение позволяет управлять вращением вала двигателя в двух направлениях. В таблице под схемой приводятся режимы работы АД при подаче импульсов разного уровня на управляющие ножки микросхемы.
Так как данная микросхема симметрична, к ее выходам можно подключить обмотки управления и возбуждения одного двигателя. Сдвигая фазу напряжения обмотки управления на 90° вправо, либо влево относительно фазы обмотки возбуждения можно регулировать направление вращения вала двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.