где ![]() - обобщенная
величина, называемая параметром эффективности регулирования;
- обобщенная
величина, называемая параметром эффективности регулирования;
![]() - напряжение
задержки цепи регулирования;
- напряжение
задержки цепи регулирования;
Kд – коэффициент передачи детектора АРУ.
Чем больше параметр Д0, т. е. чем больше число регуляторов и их чувствительность, а также напряжение задержки, тем качественнее система АРУ и тем в большей степени реальная амплитудная характеристика приемника Uвых = φ1(EА) приближается к идеальной. При этом безразлично, обеспечивается ли необходимое напряжение на входе детектора АРУ основным усилительным трактом или с помощью вспомогательных усилителей.
На рис. 6.3 приведены идеальная и реальные амплитудные характеристики приемника с простой, задержанной и задержанной усиленной АРУ. Там же для сравнения приведена амплитудная характеристика приемника без АРУ.
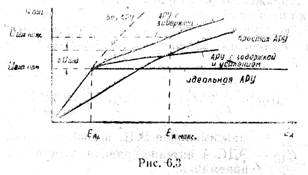
Зная величины ЕА0 и ЕА макс,с помощью амплитудной характеристики можно определить действительную глубину регулирования (коэффициент авторегулирования) но формуле
![]()
Кроме того, с помощью амплитудной характеристики можно вычислить максимальное регулирующее напряжение в цепи АРУ. В частности, для АРУ с задержкой согласно рис. 6.3 получим

где β' = Uвых макс/Uвых ном.
Динамические свойства замкнутой системы АРУ, т. е. время и характер установления стационарного состояния на выходе цепи регулирования и уровень остаточных пульсаций регулирующего напряжения, определяются структурой и параметрами фильтра АРУ, а также эквивалентной постоянной времени цепи регулирования Тэ.
Чем меньше Тэ, тем больше быстродействие системы АРУ, но тем больше и остаточные пульсации продетектированных AM колебаний, которые вместе с постоянным напряжением Up передаются на управляемые нелинейные элементы ЭР. Следовательно, в приемниках AM сигналов система АРУ является причиной обратной связи по огибающей входного сигнала, особенно па низкочастотных ее составляющих. Такая обратная связь вызывает изменение коэффициента модуляций сигнала, вносит дополнительные фазовые и нелинейные искажения огибающей и может вызвать возбуждение усилителя, охваченного цепью АРУ, если огибающая AM сигналов и пульсации на выходе фильтра АРУ совпадут или будут близки по фазе.
Для уменьшения указанных искажений в качестве основного фильтра АРУ используют однозвенные RC фильтры и выбирают постоянные времени развязывающих фильтров примерно на порядок меньше постоянной времени основного фильтра. В этом случае переходной процесс в цепи регулирования носит апериодический характер, а фазовый сдвиг пульсаций регулирующего напряжения φАРУ практически не превышает 90°.
Постоянная времени основного фильтра АРУ Т = RC выбирается в зависимости от требований к системе АРУ.
В тех случаях, когда заданы допустимое изменение коэффициента модуляции mвых/mвх, значение фазового сдвига φАРУ или коэффициент нелинейных искажений Kг, минимальная величина Т выбирается из условия
![]()
где F – наименьшая (или заданная) частота модуляции;
ρ – наименьшее из чисел ![]()
μмакс – максимальное петлевое усиление в цепи АРУ.
При линейной РХ
![]()
где Kд - коэффициент передачи детектора АРУ;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.