Введемо таке
позначення величин ознак розпізнавання: ![]() – дійсне значення ознаки
знаходиться в полі допусків d,
– дійсне значення ознаки
знаходиться в полі допусків d, ![]() – дійсне значення ознаки знаходиться
лівіше поля допусків d та
– дійсне значення ознаки знаходиться
лівіше поля допусків d та ![]() – дійсне значення ознаки знаходиться правіше поля допусків d.
– дійсне значення ознаки знаходиться правіше поля допусків d.
Рис. 3.4 ілюструє можливі наслідки контролю і-ї ознаки при триальтернативній системі оцінок рішення, яка характеризується такими точнісними характеристиками:
· помилки першого роду a1 = p(g 2 / m 1)(рис.3.4а) і a2 = р(g3 / m1) (рис. 3.4б);
· помилки другого родуb1 = р(g1 / m2) (рис. 3.4в) і b2=р(g1 / m3) (рис. 3.4г);
· помилки третього роду s1 = р(g2 / m3) (рис. 2.4д) і s2 = р(g3 / m2 ) (рис. 3.4е);
·
перша
достовірність ![]() (рис. 3.4є);
(рис. 3.4є);
·
друга
достовірність ![]() (рис 3.4ж);
(рис 3.4ж);
·
третя
достовірність ![]() (рис 3.4з).
(рис 3.4з).
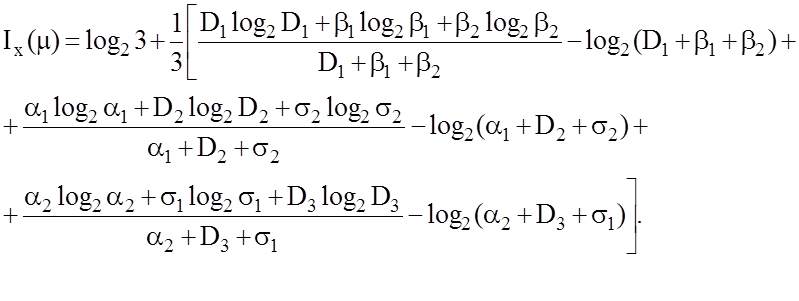
Кількість
середньої умовної інформації ![]() про величину
про величину ![]() , яка міститься у векторі х, за
виразом (3.1.4) при M=3 і
рівноймовірних гіпотезах, як відомо, дорівнює
, яка міститься у векторі х, за
виразом (3.1.4) при M=3 і
рівноймовірних гіпотезах, як відомо, дорівнює
 (3.3.1)
(3.3.1)
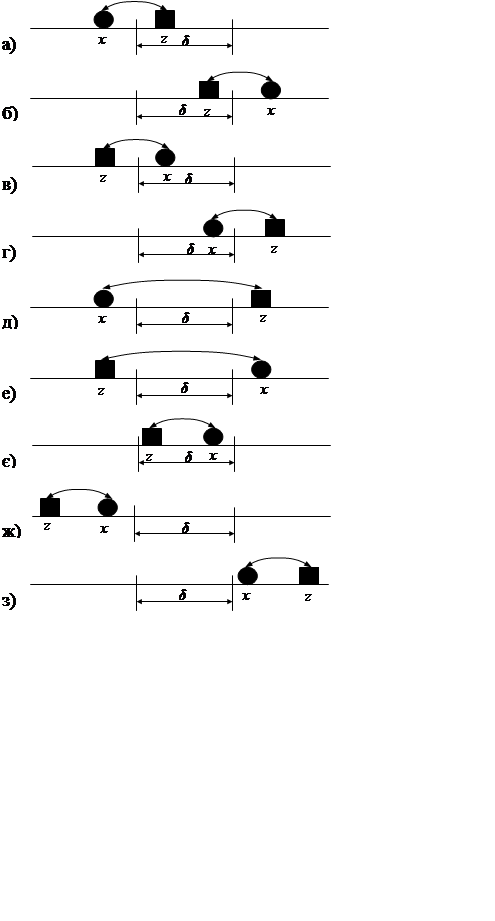 |
Рис. 3.4. Можливі результати оцінки виміру ознаки розпізнавання при
триальтернативному рішенні
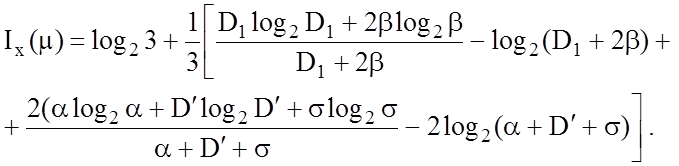
Виразимо
ймовірності p(mm/gl) через апріорні за формулою (1.4.1) при ![]() і підставимо їх у формулу
(3.3.1), яка після ряду перетворень і підстановки відповідних точнісних
характеристик набуває вигляду:
і підставимо їх у формулу
(3.3.1), яка після ряду перетворень і підстановки відповідних точнісних
характеристик набуває вигляду:
 (3.3.2)
(3.3.2)
Оскільки для точнісних характеристик мають місце такі співвідношення:
D1 + a1 + a2 =1; D2 + b1 + s1 =1;D3+ b2 + s2 =1, (3.3.3)
то вираз (3.3.2) можна спростити. Для
цього припустимо, що при симетричних полях допусків на ознаки розпізнавання
помилки одного роду є рівноймовірними, тобто можна покласти ![]() і
і ![]() Таким чином, замість (3.3.3) маємо
Таким чином, замість (3.3.3) маємо
D1+2![]() =1; D2+
=1; D2+![]() +
+![]() =1; D3+
=1; D3+![]() +
+![]() =1. (3.3.4)
=1. (3.3.4)
Звідки
D2 = D3 = D¢. (3.3.5)
Тоді, врахувавши (3.3.4) і (3.3.5), вираз (3.3.2) можна спростити:
 (3.3.6)
(3.3.6)
На рис. 3.5 наведено номограму для обчислення кількості умовної інформації при триальтернативній системі оцінок рішеннь.
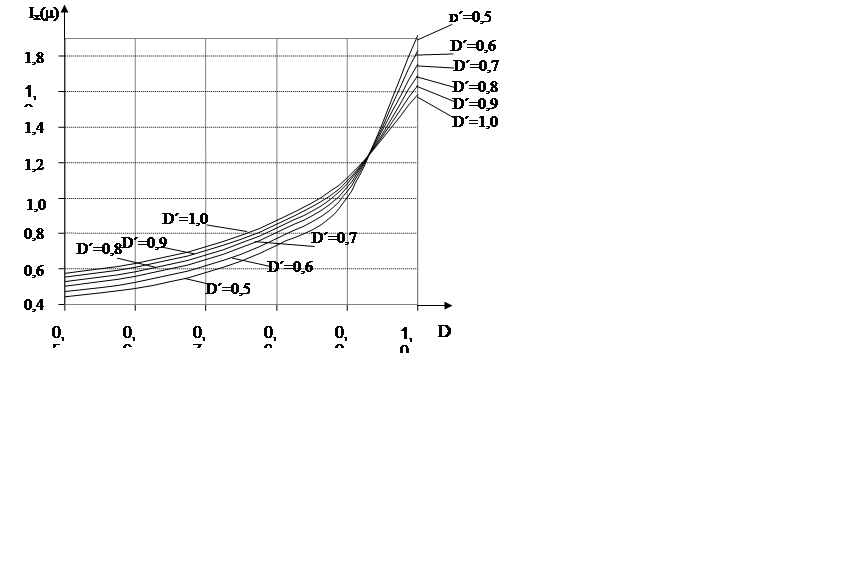 |
Аналіз виразу
(3.3.6) підтверджує, що близькі до нуля значення помилки s мало впливають на зміну
кількості інформації, оскільки 
3.4. Модифікації інформаційної міри Кульбака
Серед логарифмічних статистичних інформаційних мір найбільше розповсюдження знайшла ентропійна міра Шеннона, яка є інтегральною мірою різноманітності. Разом з тим, ще недостатньо уваги приділяється вивченню властивостей міри Кульбака [164], яка дозволяє оцінювати диференційну інформативність ознак розпізнавання. Одержимо робочу формулу для оцінки функціональної ефективності навчання СК розпізнавати реалізації двох образів за Кульбаком та встановимо її зв’язок з точнісними характеристиками процесу навчання в рамках МФСВ.
Нехай ![]() - основна гіпотеза про належність реалізацій m-го образу j-му
діапазону області класу
- основна гіпотеза про належність реалізацій m-го образу j-му
діапазону області класу ![]() , тобто контейнеру
, тобто контейнеру  . Тоді
. Тоді ![]()
![]() - апостеріорні ймовірності належності контейнеру реалізацій відповідно класів
- апостеріорні ймовірності належності контейнеру реалізацій відповідно класів ![]() і
і ![]() , де
, де ![]() - найближчий сусідній клас до
- найближчий сусідній клас до ![]() .
Відомо, що міра Кульбака розглядається як добуток відношення правдоподібності L на міру відхилень розподілів
імовірностей. У даному випадку, логарифмічне відношення правдоподібності визначимо
як
.
Відомо, що міра Кульбака розглядається як добуток відношення правдоподібності L на міру відхилень розподілів
імовірностей. У даному випадку, логарифмічне відношення правдоподібності визначимо
як

де k- кількість діапазонів
(контейнерів) в яких знаходяться реалізації класів ![]() і
і
![]() .
.
За умови побудови
контейнерів у радіальному базисі, верхня границя k дорівнює кількості
відбудованих на кожному кроці навчання концентрованих контейнерів класу ![]() , центрами яких є вершина еталонного
вектора
, центрами яких є вершина еталонного
вектора ![]() . Міра Кульбака тоді набуває вигляду:
. Міра Кульбака тоді набуває вигляду:

* [
 ]. (3.4.1)
]. (3.4.1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.