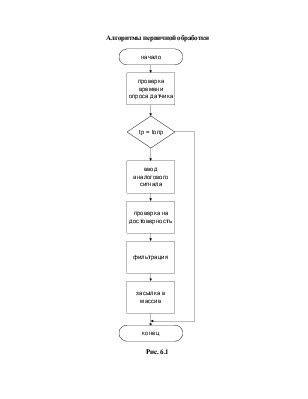








Алгоритм при первичной обработке выглядит следующим образом:
В работе необходимо производить фильтрацию сигнала по fср. датчика. Т.е. произвести обработку сигнала в по верхней рабочей частоте.
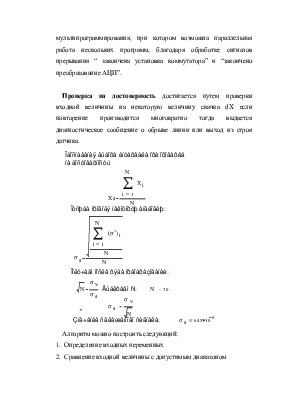
Подпрограмма проверки на достоверность (обнаружения ошибок вначале измерения). Выходной сигнал с АЦП может быть недостоверен, если:
Датчик вышел из строя;
Появилась импульсная помеха;
Произошел обрыв в канале связи.
Проверка на достоверность осуществляется слежением за скоростью изменения измеряемой величины. Интервал контроля по производной Тui обычно больше периода опроса i-го датчика Топрi: Тui> Топрi, поскольку проверка скорости изменения на каждом датчике не имеет смысла, так как можно попасть на пики погрешности измерения и при этом допустимое изменение измеряемой величины за интервал опроса будет сравнимо с величиной помехи. Для исключения влияния случайных выбросов сообщение о неисправности канала измерения вырабатывается при многократном (например, трехкратном) подтверждении превышения допустимого значения скорости изменения измеряемой величины, т.е. после получения первого сигнала о нарушении, проверку повторяют еще дважды, но уже на каждом опросе датчиков.
Так как управляющее ТП выполняется в реальном времени то перед опросом i-го датчика должна быть выполнена проверка его опроса tопр. с реальном времени tp Если ситуация на техническом объекте управлении подвержена частым изменениям, например, может меняться уровень электрических шумов, то необходимо периодически проверять расчетные параметры сглаживания ai или Mi. Для этого по прерыванию от таймера, включаются модуль расчета оптимальных значений ai или Mi. Оптимальными значениями считаются значения этих параметров, обеспечивающие среднеквадратическую ошибку сглаживания в пределах требуемой.
Рассматриваемый вариант программы первичной обработки аналоговой информации связывает в логическую последовательность программных модулей процедур обработки по каждому датчику. При обращении к соответствующей подпрограмме указывает номер датчика и результат предыдущей процедуры обработки.
Структура данных для программы сбора и первичной обработки аналоговых сигналов выполняет типовые для АСУ функции:
1) Условно-постоянная информация
- Адрес подключаемого датчика
- Электрический диапазон сигнала
- Коэффициент усиления
- Коэффициент масштабирования
- Коэффициент линеаризации
- Переменная сглаживания
- Переменная проверка на достоверность
2) Переменная информация
- Текущее значение измеряемых величин
- Суммарные значения расходов
Алгоритмы первичной обработки
Рис. 6.1
Для ввода аналоговых сигналов опишем подпрограмму опроса датчиков. Существуют три метода опроса:
одноточечный (один за другим);
метод последовательной таблицы (считывается большое количество сигналов по последовательным адресам коммутатора);
Блок–схема подпрограммы ввода аналоговых сигналов с использованием опроса датчиков по методу последовательной таблицы приведена на рисунке 6.2. [6]
Блок–схема подпрограммы ввода аналоговых сигналов

рис. 6.2
Как видно из этого рисунка, запуск АЦП производится только после получения признака установки коммутатора в заданное состояние, а считывание кода с выхода АЦП – после получения признака об окончании преобразования. Поскольку время переключения коммутатора и время преобразования в АЦП может быть существенным, с целью рационального использования машинного времени процессора рекомендуется режим мультипрограммирования, при котором возможна параллельная работа нескольких программ, благодаря обработке сигналов прерывания “ закончена установка коммутатора” и “закончено преобразование АЦП”.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.