











Отклонение фактической частоты вращения от стандартного значения не должно превышать d = ±10 (j - 1) %. В нашем случае отклонение составляет
d = ±10 (1,26 - 1) % = ± 2,6%
n = 80 - 100 - 125 - 160 - 200 - 250 - 315 - 400 - 500 - 630 - 800 - 1000
d = 0,6 – 3,5 – 0,2 – 0,6 – 3,6 – 0,3 – 1,8 - 4 - 0,3 – 1,8 – 4,1 – 0,2
Как видно из результатов, 4 частоты вращения имеют отклонения выше нормативного.
Общим для них является
включение передачи 20/26 = 0,769
проектное значение должно обеспечивать отношение i4 = (500/630) = 0,794.
Это связано с тем, что мы
округлили число зубьев шестерни в меньшую сторону до 20.
Если полученные числа зубьев не обеспечивают точного передаточного отношения,
то нужно применять коррекцию зубьев, которая сводится к увеличению или уменьшению
числа зубьев при сохранении диаметра начальной окружности зубчатого колеса.
Величину коррекции можно допускать до 10-15%.
Уменьшим число зубьев колеса на 1, тогда передаточное отношение составит i4 i4 = 20/25 = 0,8. Величина коррекции составит 100* (26-25) / 25 = 4% , что является допустимым.
Пересчитаем полученные передаточные отношения:
 d = 0,36%
d = 0,36%
 d = 0,31%
d = 0,31%
 d
= 0,16%
d
= 0,16%
 d = 1,03%
d = 1,03%
Что является допустимым.
Запишем общее уравнение кинематического баланса:

Диаграмма частот вращения
В результате проведенных расчетов строим полную диаграмму частот вращения (ДЧВ) с указанием передаточных отношений всех передач привода.
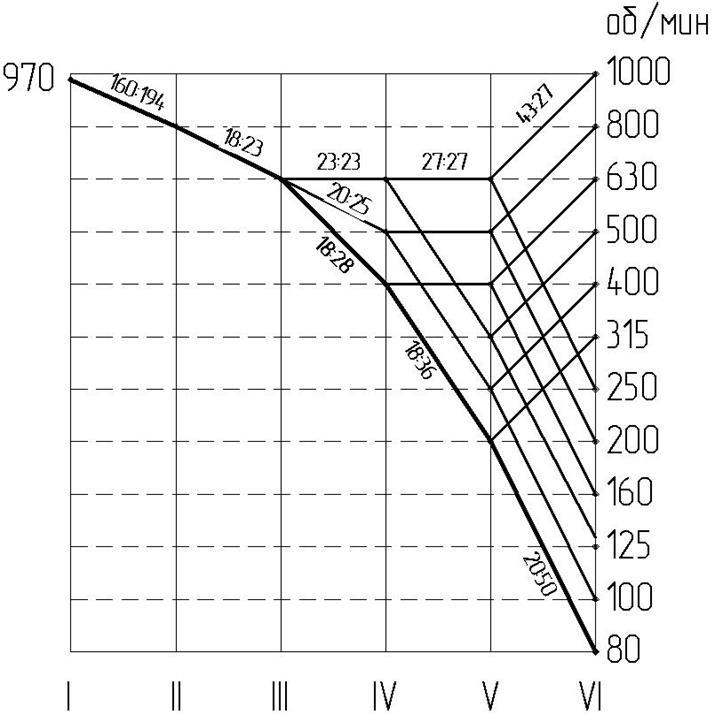
Рис. Диаграмма частот вращения валов привода.
Разработка кинематической схемы.
При построении кинематической схемы привода указываем: номера валов, позиции кинематических элементов, частоты вращения электродвигателя, диаметры шкивов, числа зубьев колес. Схема вычерчивается в произвольном масштабе, при этом считают, что модули всех зубчатых колес равны 1 мм. В подрисуночной подписи приведена полная структурная формула.
При вычерчивании подвижных тройных блоков колесо с наибольшим числом зубьев должно располагаться в середине блока, а при необходимости изобразить блок из четырех зубчатых колес, его лучше разбить на два двойных подвижных блока, естественно, расположенных на одном валу.
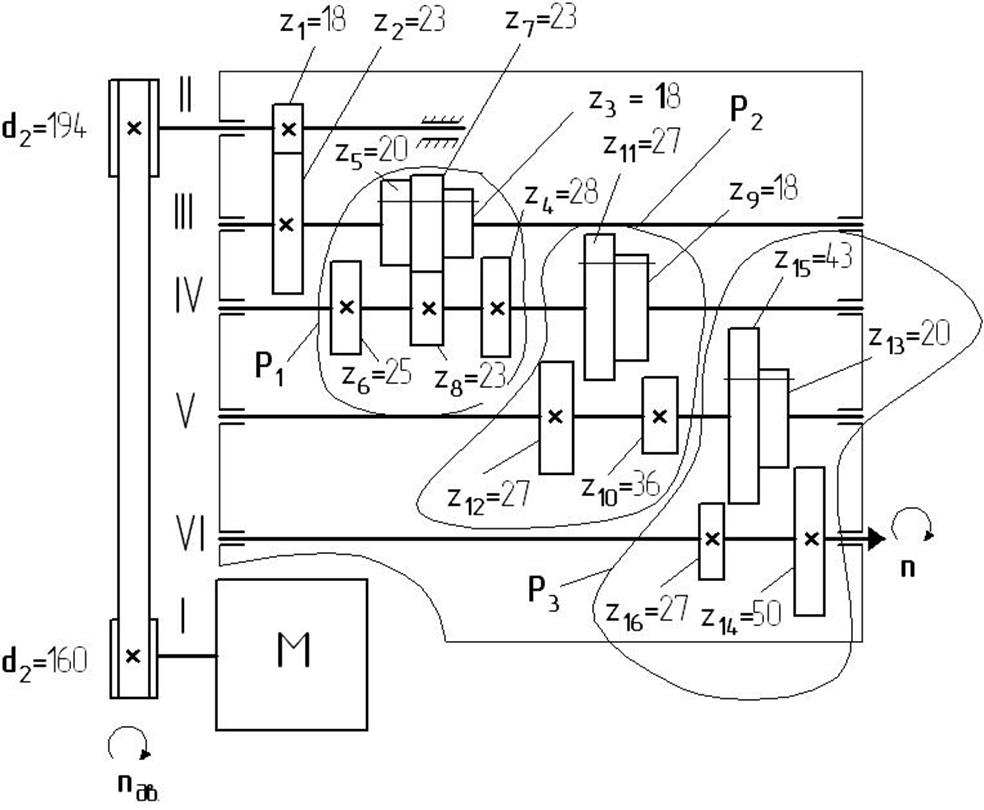
Рис. Кинематическая схема привода.
Проектирование и расчет шпиндельных узлов.
Исходные данные: Вариант №70
- Тип станка: фрезерный
- Ширина стола станка: 800
- Максимальная частота вращения шпинделя: 1800
- Тип смазки: пластичная.
На основании исходных данных необходимо выполнить следующее:
- Выбрать конфигурацию и основной размер переднего конца шпинделя.
- Определить диаметры шеек шпинделя под подшипники и диаметр
отверстия в шпинделе.
- Определить скоростной параметр d * n и выбрать соответствующую кинематическую схему шпиндельного узла.
- Определить при помощи справочника радиальную жесткость опор шпинделя.
- Рассчитать оптимальное расстояние между опорами, при котором
обеспечивается максимальная радиальная жесткость шпиндельного узла.
- При необходимости, с учетом известных ограничений и требований,
скорректировать межопорное расстояние.
- Вычислить действительную радиальную жесткость шпиндельного
узла и сравнить ее с рекомендуемыми значениями жесткости.
- Составить рисунки:
а) выбранной типовой кинематической схемы шпиндельного узла с указанием номеров подшипников и величины скоростного параметра;
б) полуконструктивной схемы шпиндельного узла с основными проектными размерами в виде их числовых значений;
в) конструктивные схемы передней и задней опоры шпинделя с указанием номеров подшипников.
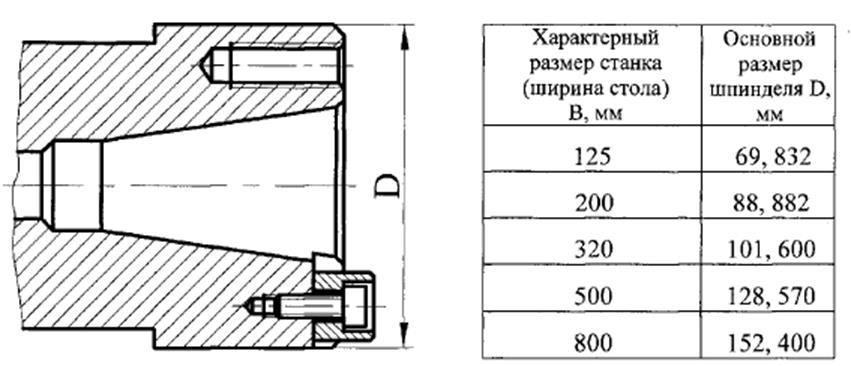
Рис. Основной размер переднего конца шпинделя фрезерного станка в зависимости от ширины стола B.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.