 , (4.4.12)
, (4.4.12)
где N0d – уровень шума приемного устройства в линии вниз. Если это пороговое отношение сигнал/шум достаточно для уверенного приема колебаний, то на выходе фазового детектора имеем
 , (4.4.13)
, (4.4.13)
где nd(t) – шум в линии связи вниз, мощность
которого равна ![]() . Полный последетекторный шум в (4.4.13)
может быть определен с помощью эквивалентного шума в линии связи вниз со
спектральным уровнем, равным
. Полный последетекторный шум в (4.4.13)
может быть определен с помощью эквивалентного шума в линии связи вниз со
спектральным уровнем, равным
 , (4.4.14)
, (4.4.14)
где отношение сигнал/шум CNR определено в (4.4.9) и (4.4.12).
Следовательно, уровень шума на выходе демодулятора увеличивается под влиянием шума в линии вверх на ПЧ пропорционально отношению CNR в линии вверх к CNR в линии вниз.
Отметим, однако, что шум в линии вверх не изменяет пороговую величину CNR в (4.4.12). Для сравнения отметим, что в случае ВЧ-ВЧ преобразования (4.4.6) шум напрямую уменьшает величину CNRd.
Преобразование Демодуляция-Модуляция
В системах обработки спутниковых сигналов с использованием демодуляции и ремодуляции сигнал в линии вверх демодулируют и демодулированный сигнал используют как модулирующий на несущей в линии вниз. Такая обработка позволяет: (1) восстановить передаваемые команды из модулированной несущей и (2) ввести спутниковые телеметрические данные в модулированное колебание линии вниз. Преимуществом такого способа обработки является то, что спектр шума не передается непосредственно в линию вниз.
Если величина CNR в (4.4.9) достаточно большая, то возможна идеальная фазовая демодуляция несущей на ПЧ, в результате которой выделяют колебание вида
 . (4.4.15)
. (4.4.15)
В последней формуле nu(t) – это квадратурный шум, присутствующий в частотной полосе модуляции m(t). Сигнал x(t) имеет амплитуду, достаточную для формирования нового индекса фазовой модуляции Δd для линии вниз. В этом случае несущую в линии вниз модулируют колебанием вида
 . (4.4.16)
. (4.4.16)
После фазовой демодуляции в линии вниз эквивалентный спектральный уровень шума приемника равен величине
 , (4.4.17)
, (4.4.17)
которая подобна величине, представленной в выражении (4.4.14).
В случае использования цифровой модуляции демодуляция в транспондере может быть интерпретирована как декодирование битов. Ремодуляция соответствует кодированию данных декодированных битов на другую несущую. Это означает, что некоторый бит источника информации при прохождении через систему обработки транспондера и возвращении на Земную станцию подвергается двойному каскадному декодированию. Стадии каскадного декодирования представлены на диаграмме на рис. 4.14. Пусть РЕ1 означает вероятность ошибки бита при декодировании данных в линии вверх и пусть РЕ2 означает соответствующую вероятность в линии вниз. Тогда средняя вероятность ошибки бита равна
РЕ=(1-РЕ1)РЕ2+РЕ1(1-РЕ2)=РЕ1+РЕ2 – 2РЕ1РЕ2. (4.4.18)
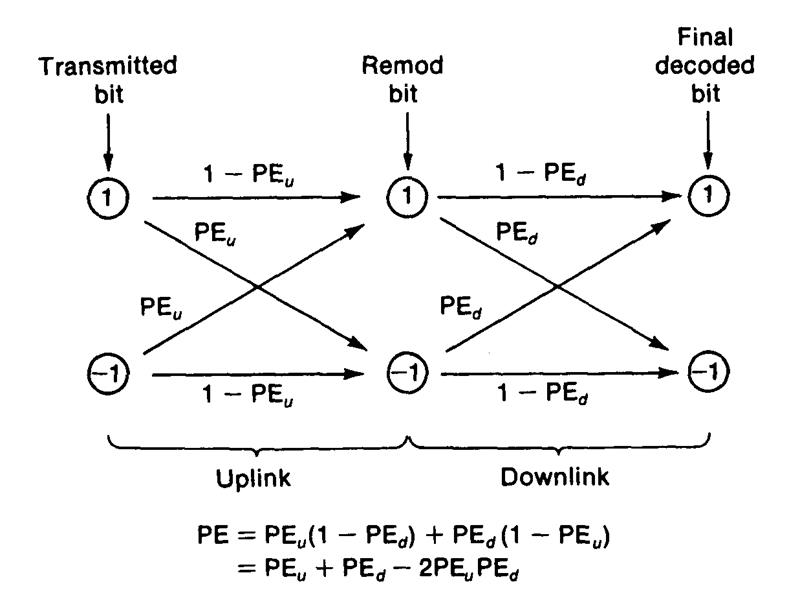 |
Рис. 4.14. Стадии каскадного бинарного декодирования в цифровом транспондере с использованием демодуляции-ремодуляции.
Если обе линии рассчитаны на работу с малыми величинами РЕ (РЕ1, РЕ2 ≤10-1), то последний член в (4.4.18) будет значительно меньше, чем сумма. Это означает, что полная вероятность ошибки передачи бита информации РЕ, рассчитываемая для транспондера, определяется суммой вероятностей ошибок в каждой линии. Наиболее слабая линия (линия, которая отличается наибольшей вероятностью РЕi) будет, следовательно, определять полную вероятность РЕ и не будет наблюдаться преимущество одной линии по сравнению с другой в терминах вероятности ошибок.
В качестве примера рассмотрим линии вверх и вниз с использованием системы BPSK, работающие при отношениях сигнал/шум: для линии вверх – (Eb/N0)u и для линии вниз (Eb/N0)r. Предположим, что полная вероятность ошибки в транспондере с использованием ремодуляции равна РЕ. На рис. 4.15 представлено семейство графиков для различных величин Eb/N0 для линии вверх и линии вниз, которые позволяют определить величину вероятности ошибки РЕ в пределах 10-3 …10-6 в каскадной системе демодуляция-ремодуляция. Данные графики полезны для разработки и эксплуатации аппаратуры бортовых и Земных систем связи.
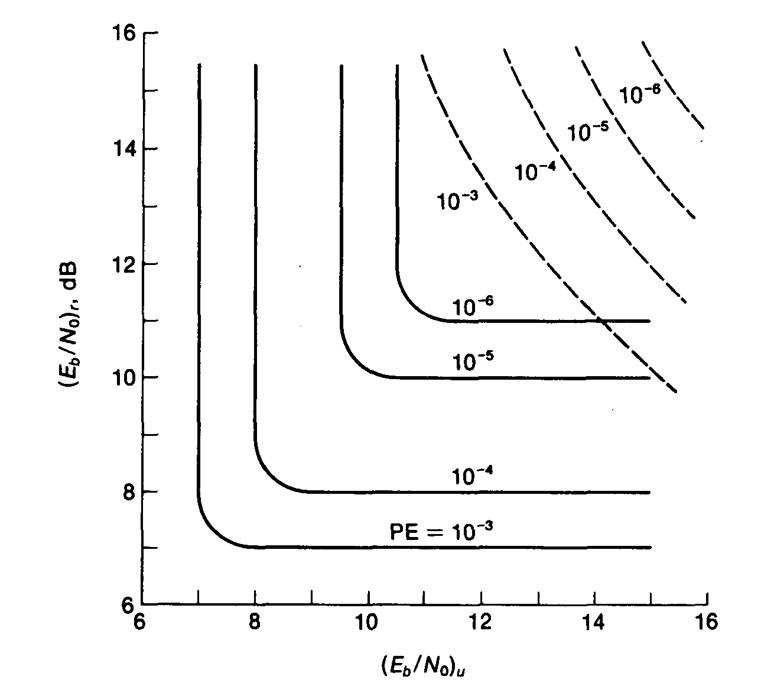 |
Рис. 4. 15. Требуемые величины Eb/N0 в линиях вверх и вниз, обеспечивающие заданные значения вероятностей РЕ (––– система демодуляция-ремодуляция; ----- идеальный сдвиг частоты).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.