Манипулятор предназначен для выполнения операций транспортирования и ориентации деталей при работе в автоматическом режиме по командам УУ.
 Манипулятор
выполнен в модульном исполнении, позволяющим производить перекомпоновку узлов
модулей с целью получения некоторого ряда исполнений.
Манипулятор
выполнен в модульном исполнении, позволяющим производить перекомпоновку узлов
модулей с целью получения некоторого ряда исполнений.
Номинальная грузоподъёмность, кг 1
суммарная в каждой руке 0,5
2. Максимальная абсолютная
погрешность позиционирования, мм 0,1
3. Максимальная величина горизонтального
перемещения, мм 200
4. Максимальный угол поворота в горизон-
тальной плоскости, ... 120
5. Максимальная величина вертикального
перемещения (подъёма), мм 65
6. Максимальная величина сдвига схвата, мм 25
7. Максимальный угол поворота (ротации)
схвата вокруг продольной оси, ... 180
8. Время выдвижения (втягивания) рук при
максимальной величине перемещения, с 2
9. Время поворота рук в горизонтальной
плоскости при максимальном угле поворота, с 1
10. Время подъёма (опускания) рук при макси-
мальной величине перемещения, с 0,5
11. Время сдвига схвата при максимальной
величине сдвига, с 0,36
12. Время сжатия (разжатия) схвата, с 0,35
13. Время ротации схвата при максимальном угле
ротации, с 0,4
14. Максимальный угол между руками, 100
15. Минимальный угол между руками, 20
16. Рабочее давление пневмопитания мПа (кг/см2 ) 0,4-0,5 (4-5)
17. Напряжение управления электроклапанов, В 24
род тока постоянный
сила тока, А не более 0,5
18. Напряжение питания датчиков контроля
отработки перемещений, В 0,5-30
род тока постоянный
сила тока, А не более 0,1
19. Тип устройства управления цикловой
20. Количество команд на управление манипулятором 12
Примечание: на данные по техническим характеристикам рекомендуется обращать особое внимание при составлении циклограммы работы робота.
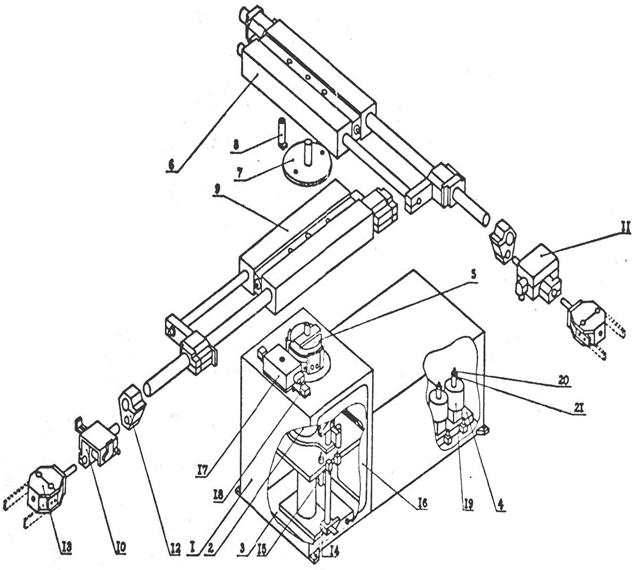
Рис. 41. Манипулятор МП-11.
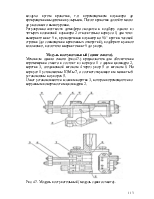
Для работы манипулятора, его необходимо соединить с устройством управления через соответствующие кабели управления, и с общей пневмомагистралью через узел подготовки воздуха.
На рис. 41. показан максимально насыщенный вариант исполнения манипулятора. При необходимости и соответствующих изменениях в схеме, модули вращательный (модуль ротации), поступательный (модуль сдвига) и поступательный могут не устанавливаться. Модуль ротации может быть установлен на модуле поступательном, а модуль сдвига - на модуле поступательном. Каркас 1 манипулятора (рис.41.) является его силовой, несущей частью. На нем размещены механизмы подъема 2 и поворота 3 с соответствующими демпферами и узел распределения воздуха 4.
На муфте 5 механизма подъема закреплены с помощью крепежных винтов и колонок 8 модули поступательные 6 (рука 1 и 2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.