Пространство
состояний (State-Space) – один
из способов описания модели с помощью системы дифференциальных уравнений
первого порядка. Пространством состояний называют минимальный набор
функций ![]() , достаточный для полного описания модели. У
системы может быть набор входных параметров
, достаточный для полного описания модели. У
системы может быть набор входных параметров ![]() и
набор выходных параметров
и
набор выходных параметров ![]() , где n – порядок системы или размерность пространства
состояний, r – размерность вектора входных
параметров, m – размерность вектора выходных
параметров. Для однозначного описания модели необходимо задать состояние
системы в начальный момент времени
, где n – порядок системы или размерность пространства
состояний, r – размерность вектора входных
параметров, m – размерность вектора выходных
параметров. Для однозначного описания модели необходимо задать состояние
системы в начальный момент времени ![]() и зависимость от
времени всех входных параметров модели в последующие моменты времени
и зависимость от
времени всех входных параметров модели в последующие моменты времени ![]() .
.
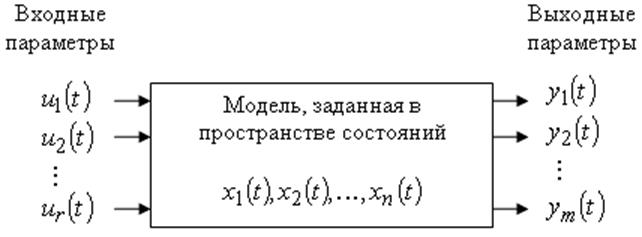
Рис. 1 Блок-схема модели.
Система из n обыкновенных дифференциальных уравнений первого порядка, описывающая поведение модели, в общем виде может быть записана как (1)
 (1)
(1)
где ![]() – некоторые
функции от величин, описывающих состояние системы, входных параметров и
времени. Производные по времени находятся только в левой части уравнений. Для
краткости введены следующие обозначения:
– некоторые
функции от величин, описывающих состояние системы, входных параметров и
времени. Производные по времени находятся только в левой части уравнений. Для
краткости введены следующие обозначения:
 (2)
(2)
Систему (1) называют уравнения
состояния, а вектор ![]() – вектор состояний. С помощью
системы уравнений состояния (1) можно описывать как линейные, так и нелинейные
модели.
– вектор состояний. С помощью
системы уравнений состояния (1) можно описывать как линейные, так и нелинейные
модели.
Линейные
системы с сосредоточенными параметрами (line and time-invariant system – LTI) описываются
системой линейных обыкновенных дифференциальных уравнений с постоянными
коэффициентами. В этом случае функции ![]() должны
линейно зависеть от
должны
линейно зависеть от ![]() и
и ![]() . Тогда
общий вид системы (1):
. Тогда
общий вид системы (1):
 (3)
(3)
где ![]() и
и ![]() константы, описывающие систему. Уравнения
(3) могут быть записаны в матричной форме:
константы, описывающие систему. Уравнения
(3) могут быть записаны в матричной форме:
 (4)
(4)
или в более компактном виде:
![]() (5)
(5)
где A
и B обозначают соответствующие матрицы в (4).
Размерность матрицы A ![]() , матрицы B
, матрицы B ![]() .
.
Выходными параметрами модели может быть любой набор величин, представляющий интерес. При этом для описания модели в терминах пространства состояний могут быть выбраны другие величины, отличные от тех, которые выбраны как выходные параметры модели. Выходные параметры выражаются через вектор состояний и входные параметры с помощью системы уравнений для выходных параметров. В случае линейной системы с распределёнными параметрами уравнение для выходных параметров также будет линейным с постоянными коэффициентами, которое можно записать в матричной форме:
 (6)
(6)
где ![]() и
и ![]() константы. Уравнения (6) в компактной
форме:
константы. Уравнения (6) в компактной
форме:
![]() (7)
(7)
Размерность матрицы C – ![]() , матрицы D –
, матрицы D – ![]() .
.
Полная система уравнений для линейной системы с сосредоточенными параметрами состоит из уравнения состояния (5) и уравнения для выходных параметров (7). Матрицы A и B определяются структурой системы и её элементами, а матрицы C и D – выбором выходных параметров.
Целиком процедура моделирования состоит из следующих этапов:
1. определить
порядок системы n и выбрать набор величин ![]() , описывающих состояние системы.
, описывающих состояние системы.
2. Составить систему уравнений состояния, то есть найти матрицы A и B.
3. Подобрать
матрицы C и D,
чтобы выразить интересующие выходные параметры через вектор состояния ![]() и входные параметры
и входные параметры ![]() .
.
Пример 1
Написать уравнение состояния для дифференцирующей цепочки. Входным параметром будет напряжение, подаваемое на вход цепочки, выходным параметром падение напряжения на сопротивлении (рис. 2).
Рис. 2 Дифференцирующая цепочка.
Пусть R = 10кОм, C = 1мкФ, тогда RC = 0.01с, нулевые начальные условия, то есть до возникновения входного сигнала, напряжение на обкладках конденсатора равно нулю.
Сначала
определяем порядок системы и подбираем минимальный набор величин для задания
состояния системы. Уравнения состояния содержат в левой части первые производные
по времени, поэтому в качестве величин, описывающих состояние системы, удобно
выбрать те, которые являются интегралом по времени от другой величины. В данном
примере это напряжение на конденсаторе ![]() ,
которое выражается через интеграл от тока I. Через
конденсатор и сопротивление течёт одинаковый ток, так как они включены
последовательно.
,
которое выражается через интеграл от тока I. Через
конденсатор и сопротивление течёт одинаковый ток, так как они включены
последовательно.
 (8)
(8)
Запишем всё в обозначениях, в
которых написана формула (5). Входной параметр ![]() ,
вместо вектора состояния будет скаляр, так как у дифференцирующей цепочки
только одна величина выражается как интеграл по времени, поэтому
,
вместо вектора состояния будет скаляр, так как у дифференцирующей цепочки
только одна величина выражается как интеграл по времени, поэтому ![]() , выходной параметр
, выходной параметр ![]() .
Ток может быть выражен через падение напряжения на сопротивлении по закону Ома.
.
Ток может быть выражен через падение напряжения на сопротивлении по закону Ома.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




