

![]()
6. Расчет токовой отсечки, построение статических характеристик.
Статическая просадка скорости при
работе на характеристике, обеспечивающей ![]() при
номинальном токе двигателя:
при
номинальном токе двигателя:

Скорость идеального холостого хода:
![]()
Уровень задающего напряжения,
обеспечивающий ![]() :
:
Аналогичный расчет проводим для номинального режима работы ЭП:

![]()
Расчет токовой отсечки.
Статическая структурная схема СУЭП представлена на рис. 3
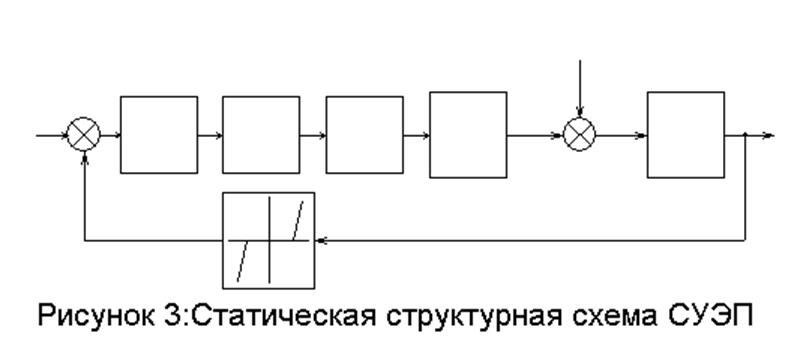
Токовая отсечка рассчитывается при максимальном сигнале задания скорости:
Ток отсечки:
![]()
Ток упора:

График скоростной характеристики ЭП представлен в приложении(см. рис.2).
Коэффициент усиления разомкнутой СУЭП:

Напряжение обратной связи по току на участке токовой отсечки:
![]()
Из схемы СУЭП с учетом узла токовой отсечки, имеющей характеристику представленную в приложении 4.

Выразим ![]() при
при ![]() и
и ![]() :
:

При ![]()


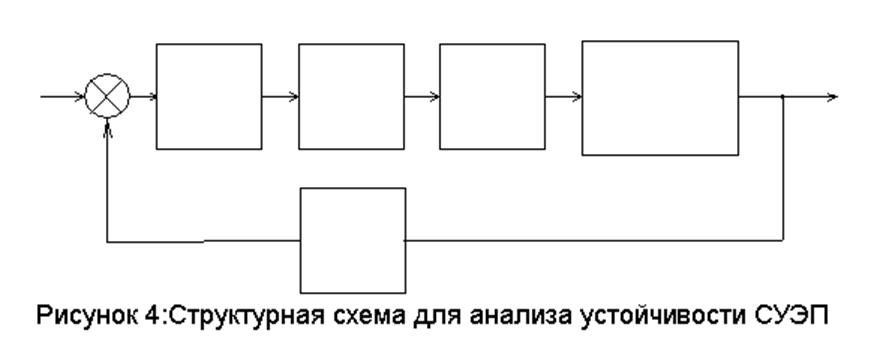
7. Анализ устойчивости СУЭП.
Наиболее неблагоприятны для устойчивости СУЭП переходные процессы, связанные с переходом ЭП на другой, отличный от предыдущего режим работы, Составляем структурную схему с учетом инерционности преобразователя и двигателя.
ТМ – механическая постоянная времени привода.
ТЯ – электромагнитная постоянная времени якорной цепи.


где
![]()

где β – коэффициент компенсации β=0.6
Исходя из рисунка 4 записываем выражение для передаточной функции замкнутой системы.
Характеристический полином замкнутой системы имеет вид:
![]()
Для исследования устойчивости воспользуемся алгебраическим критерием Гурвица. Формулировка: Для устойчивости замкнутой системы необходимо и достаточно, чтобы n диагональных миноров матрицы Гурвица были положительны, где n – степень характеристического полинома замкнутой системы.
![]()
![]()
Синтезированная система электропривода.
Предложения по обеспечению устойчивости ЭП.
Необходимо синтезировать корректирующее устройство
Корректирующие устройства бывают последовательными и параллельными. Для данного случая лучше выбрать параллельное корректирующее устройство по следующим причинам:
1)Параллельное корректирующее устройство значительно уменьшает влияние нестабильности параметров охваченных или элементов на динамические свойства системы.
2)Система с параллельной коррекцией в меньшей степени подвержена влиянию помех.
Корректирующее устройство включается в систему как дополнительная ОС. Обратные связи в свою очередь бывают гибкими и жесткими. Жесткая ОС влияет на качество системы в установившемся режиме, что нежелательно в нашем случае, поэтому применяем гибкую связь, которая действует только в переходных процессах и не влияет на качество САУ в установившемся режиме.
Описание пуска:
При пуске необходимо соблюдать ряд условий, чтобы ЭП безаварийно вышел на рабочие параметры: согласованность генератора и двигателя по напряжению, обмотка возбуждения двигателя должна быть запитана ранее обмотки якоря и т.д. Эти условия должны обеспечиваться автоматикой и контролироваться обслуживающим персоналом.
Пуск:
- Подача питания на схему управления тиристорного возбудителя и других устройств, подключение силовой цепи ЭП к источнику напряжения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.