




БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
Лабораторная работа № 3
по дисциплине:
Локальные системы управления
СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ДВУХФАЗНОГО
АСИНХРОННОГО ДВИГАТЕЛЯ
Выполнил:
ст. гр. УИТ-53
Мартиянов Р. В.
Проверила:
Комлева О.А.
Балаково 2008
Цель работы:
1. Изучение принципов построения и расчёта комбинированных систем управления.
2. Расчёт параметров настройки компенсирующих устройств при использовании экспериментально снятых характеристик системы с учётом особенностей реализации узла нагрузки двигателя.
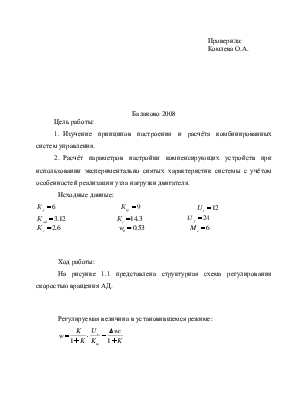
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Ход работы:
На рисунке 1.1 представлена структурная схема регулирования скоростью вращения АД.
Регулируемая величина в установившемся режиме:
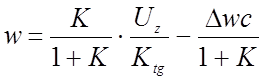
где
![]() -
коэффициент передачи разомкнутого контура,
-
коэффициент передачи разомкнутого контура, ![]()
![]() -
естественный перепад скорости двигателя под воздействием момента нагрузки,
-
естественный перепад скорости двигателя под воздействием момента нагрузки, ![]()
Отсюда получаем: ![]() рад/с.
рад/с.
Установившаяся ошибка:
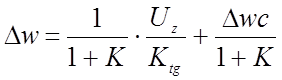
![]()
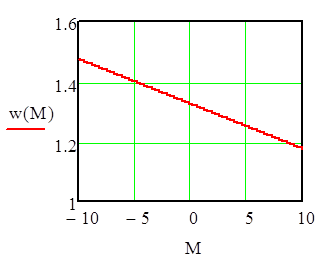
Построим зависимость регулируемой величины ![]() от момента
нагрузки
от момента
нагрузки ![]() (для
замкнутой системы).
(для
замкнутой системы).
Построим систему с компенсацией основного возмущающего воздействия:
![]()
![]()
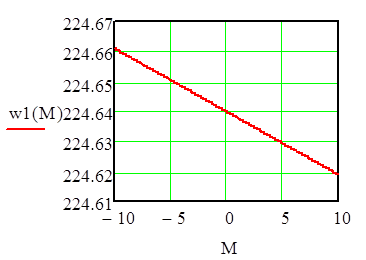
Построим зависимость регулируемой величины ![]() от момента
нагрузки
от момента
нагрузки ![]() (для
разомкнутой системы с компенсацией возмущающего воздействия).
(для
разомкнутой системы с компенсацией возмущающего воздействия).
Найдем коэффициент К1 для КУ1:
![]()
Так как значение скорости определяется наличием двух сигналов U3 и Мс, то значение установившейся ошибки выразится как:

![]()
Эта формула получена из схемы для компенсации возмущающего воздействия:
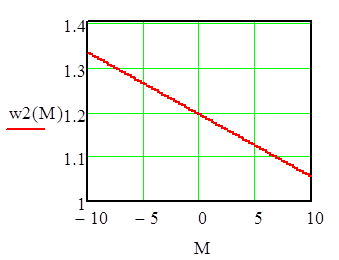
Построим зависимость регулируемой величины ![]() от момента
нагрузки
от момента
нагрузки ![]() (для
замкнутой системы с компенсацией возмущающего воздействия).
(для
замкнутой системы с компенсацией возмущающего воздействия).
При работе системы для реализации контура компенсации вместо информации о значении момента нагрузки Мс на валу двигателя в лабораторной установке может быть использована информация о значении тока в обмотках электромагнитного тормоза Iэм.
Рассчитаем коэффициент компенсации:
![]()
![]()
![]()
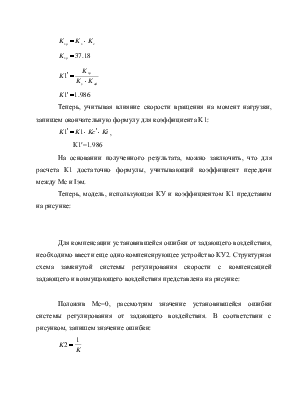
Теперь, учитывая влияние скорости вращения на момент нагрузки, запишем окончательную формулу для коэффициента K1:
![]() ,
,
К1′=1.986
На основании полученного результата, можно заключить, что для расчета К1 достаточно формулы, учитывающий коэффициент передачи между Мс и Iэм.
Теперь, модель, использующая КУ и коэффициентом К1 представим на рисунке:
Для компенсации установившейся ошибки от задающего воздействия, необходимо ввести еще одно компенсирующее устройство КУ2. Структурная схема замкнутой системы регулирования скорости с компенсацией задающего и возмущающего воздействия представлена на рисунке:
Положив Мс=0, рассмотрим значение установившейся ошибки системы регулирования от задающего воздействия. В соответствии с рисунком, запишем значение ошибки:

![]()
![]()
![]()
K2 из условий равности ошибки 0.0004 равен 0.005±0.0004
Вывод: в результате проведенных расчетов получили значения коэффициентов для КУ1 и КУ2, которые компенсировали возмущающее воздействие Mc, а также входное возмущающее воздействие. К1 = 0.139,
К2=0.005±0.0004. Таким образом, мы не только свели к минимуму ошибку регулирования, но и путем уменьшения коэффициентов КУ добились повышения статической точности системы и как следствие – повысили ее устойчивость.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.