
















































Министерство образования РФ
Саратовский Государственный Технический Университет
Балаковский Институт Техники,
Технологии и Управления
Инженерно-строительный факультет
Кафедра “Управление и информатика
в технических системах”
КУРСОВОЙ ПРОЕКТ
по дисциплине “Локальные системы управления”
Система автоматического управления
объемным гидроприводом
Выполнил студент гр. УИТ-42
_________ Мурин С.В.
²____²_______________2003 г.
Допущен к защите
Руководитель проекта Защитил с оценкой _________
____Скоробогатова Т. Н. ________ Скоробогатова Т. Н.
²____²__________2003 г. ²____²_______________2003 г.
2003
1 Техническое задание 10
1.1 Цель курсовой работы 10
2 Выбор элементной базы, проведение линеаризации, расчет передаточных функций элементов системы 12
2.1 Выбор микропроцессора 12
2.2 Выбор усилителя 12
2.3 Выбор двигателя с гидронасосом 13
2.4 Выбор дроссельного устройства 15
2.5 Выбор тахометрического датчика 23
3.1 Анализ выбранного датчика обратной связи на предмет устойчивости от внешних помех 25
3.2 Расчет основных элементов датчика 25
4 Расчет передаточной функции всей системы, расчет устойчивости системы 28
4.1 Расчет передаточной функции неизменяемой части системы и проверка её на устойчивость 28
4.2 Расчет передаточной функции системы с учетом микропроцессора и проверка её на устойчивость 32
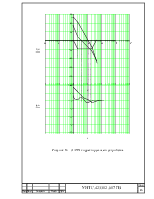
5 Построение логарифмической амплитудно-частотной и фазо-частотной характеристик системы и их анализ 35
6 Построение желаемой логарифмической амплитудно-частотной и желаемой фазо-частотной характеристик системы и их анализ 41
7 Построение логарифмической амплитудно-частотной характеристики корректирующего устройства и расчет его параметров 45
8 Установка корректирующего устройства в систему 49
9 Синтез программного корректирующего устройства 50
Заключение 54
Список используемой литературы 55
Приложение А 57
ВВЕДЕНИЕ
Гидравлические следящие приводы широко применяются в машиностроении как эффективное средство автоматизации производственных процессов. В станкостроении гидравлические следящие приводы используются в копировальных устройствах различных металлорежущих станков, работающих от копира или других задатчиков, для выполнения точных делительных и установочных операций, в агрегатных станках и автоматических линиях, составляют основу большинства систем циклового и числового программного управления. Гидравлические следящие приводы все шире применяются для автоматизации заготовительно-штамповочного и кузнечно-прессового оборудования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.