




Синтез САР, основанный на построении желаемой логарифмической амплитудной и фазовой характеристик, полученных с помощью билинейного преобразования, состоит в следующем:
а) по требованиям точности (или коэффициентам добротностей) строим низкочастотную часть желаемой логарифмической амплитудной характеристики относительно псевдочастоты ω̄(Hж (ω̄));
б) с помощью номограмм Солодовникова (рис. 9.4, б и в) по показателям качества σm и tр находим частоту среза ω̄с, через которую проводим логарифмическую амплитудную характеристику с наклоном – 20 дБ/дек;
в) строим во всем диапазоне псевдочастот логарифмическую характеристику неизменяемой части Hн (ω̄) проходящую через точку ω̄ = 1;
г) высокочастотную часть желаемой логарифмической амплитудной характеристики Hж (ω̄) выбираем аналогичной Hн (ω̄);
д) по точкам излома Hж (ω̄) вычисляем желаемую логарифмическую фазовую характеристику θж (ω̄), которую наносим на полулогарифмическую бумагу, и определяем запасы устойчивости по фазе γФ° и модулям ±HМ. Если они совпадают с данными технических условий, то построение желаемой характеристики на этом заканчивается. После этого можно приступить к формированию программ коррекции, реализуемых на микропроцессорах или микроЭВМ.
Рассмотрим применение данной методики для синтеза последовательных и параллельных корректирующих устройств.
Последовательные корректирующие устройства выбираем с использованием следующего соотношения:
Hкп (ω̄) = Hж (ω̄) – Hн (ω̄). (10.1)
Затем по логарифмической амплитудной характеристике Hкп
(ω̄) находим Wкп (s̄) и, используя формулу (1.125), получим Wкп
(z). Откуда и находим разностное уравнение, позволяющее реализовать
программы коррекции. 

Пример 10.1. Определить параметры системы, удовлетворяющей заданным техническим требованиям, и сформировать программу для микроЭВМ типа «Электроника-60», с помощью которой реализовано последовательное корректирующее устройство. Структурная схема системы изображена на рис. 10.1, а, где W1 (s) = 1; W2 (s) = Wн (s). Ее основные характеристики следующие: Dω = 40 с – 1; Dε = 7 с – 2; σm = 30%; tр £ 3,14 с.
Непрерывная неизменяемая часть системы описывается с помощью передаточной функции вида

где K = 40 с – 1; Т1 = 0,1 с; Т2 = 0,05 с; Т1 = 0,01 с.
Пусть такт обмена между непрерывной и дискретной частями T0 £ 0,01 с. В этом случае на основании прил. П-I.2 запишем:
Подставляя в выражение (10.3)
получим:
При s̄ = jω̄ из выражения (10.5) имеем:
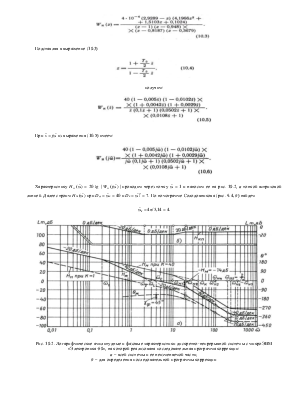
Характеристику Hн (ω̄) = 20 lg | Wн (jω̄) | проводим через точку ω̄ = 1 и наносим ее на рис. 10.2, а тонкой штриховой линией. Далее строим Hж (ω̄) при Dω = ω̄к = 40 и Dε = ω̄l2 = 7. По номограмме Солодовникова (рис. 9.4, б) найдем
ω̄c = 4π/3,14 = 4.
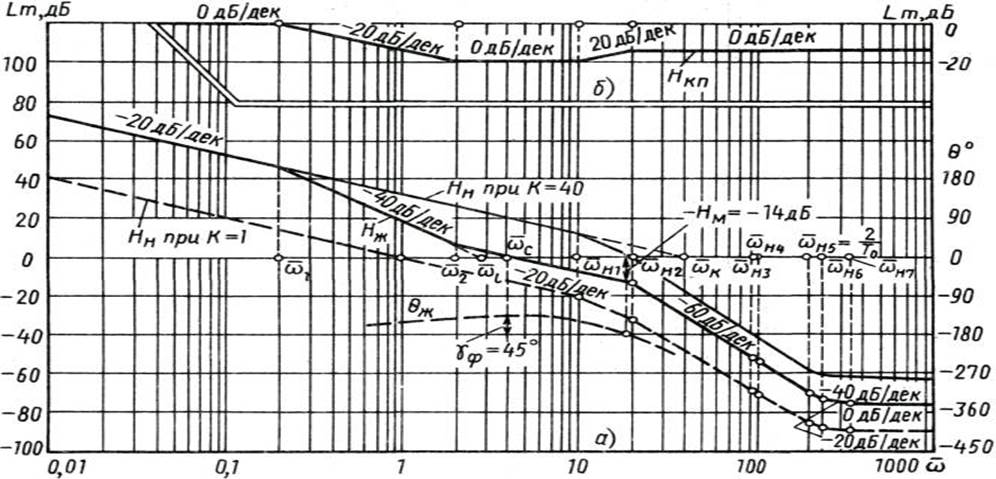
Рис. 10.2. Логарифмические амплитудные и фазовые
характеристики дискретно-непрерывной системы с микроЭВМ «Электроника-60», на
которой реализована последовательная программа коррекции:
а – всей системы и ее неизменяемой части;
б – для определения последовательной программы коррекции
Через точку ω̄c на рис. 10.2, а проведем прямую с наклоном – 20 дБ/дек до второго излома Hн (ω̄). Затем достроим остальную часть желаемой логарифмической амплитудной частотной характеристики эквидистантно к высокочастотной части Hн (ω̄).
Располагая характеристикой Hж (ω̄), запишем формулу для определения θж
(ω̄) в виде: 
По формуле (10.7) в окрестности точки ω̄c вычислим θж (ω̄) и построим ее жирной штриховой линией на рис. 10.2, а, с помощью которой находим запасы устойчивости по фазе γФ° = 45° и модулю – HМ = – 14 дБ. По номограмме (рис. 5.55) определим σm = 28 % и tр = 2,8 с. Последние соответствуют требованиям технических условий.
Пользуясь формулой (10.1), строим Hкп (ωω̄) (рис. 10.2, б) и находим передаточную функцию последовательного корректирующего устройства:

Подставляя в выражение (10.8)  получим:
получим:
По формуле (10.9) найдем разностное уравнение в реальном масштабе времени, т.е. введя в числитель дополнительный сдвиг z – 1. В результате этого получим:
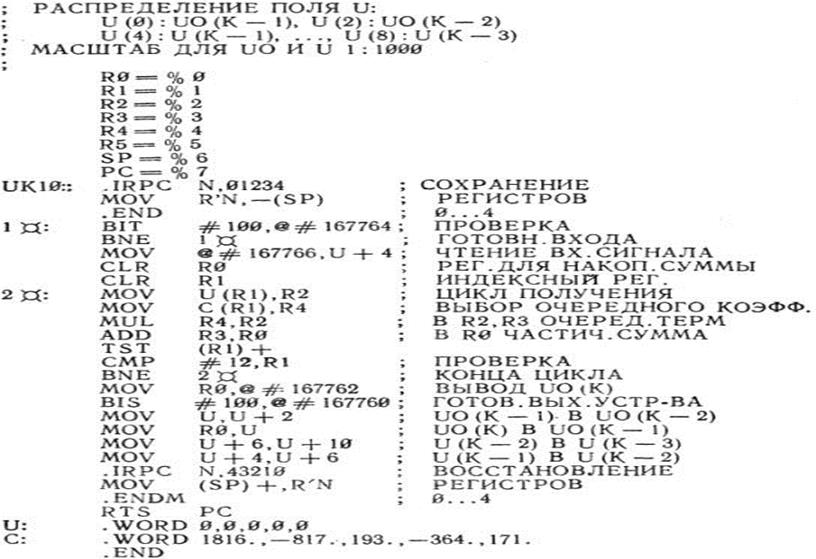
ũк = 1,8162 ũк – 1 – 0,8166 ũк – 2 + 0,1930 uк – 1 – 0,3638 uк – 2 + 0,1712 uк – 3. (10.10)
Реализуем программу коррекции на микроЭВМ
«Электроника-60» на языке ассемблер. 
Параллельные корректирующие устройства определяются в диапазоне ±26 дБ по аналогии с непрерывными системами, т.е.
Hк пр (ω̄) = – Hж (ω̄). (10.11)
Данная логарифмическая амплитудная характеристика справедлива для всего диапазона частот ω̄ при условии, что порядок астатизма исходной системы с выбранной коррекцией не понижается.
Пример 10.2. Синтезировать систему, удовлетворяющую заданным техническим требованиям, и сформировать программу для микроЭВМ типа «Электроника-60», на которой реализовано параллельное корректирующее устройство. Структурная схема системы изображена на рис. 10.1. б. Основные характеристики системы и ее неизменяемая часть соответствуют данным, приведенным в примере 10.1.
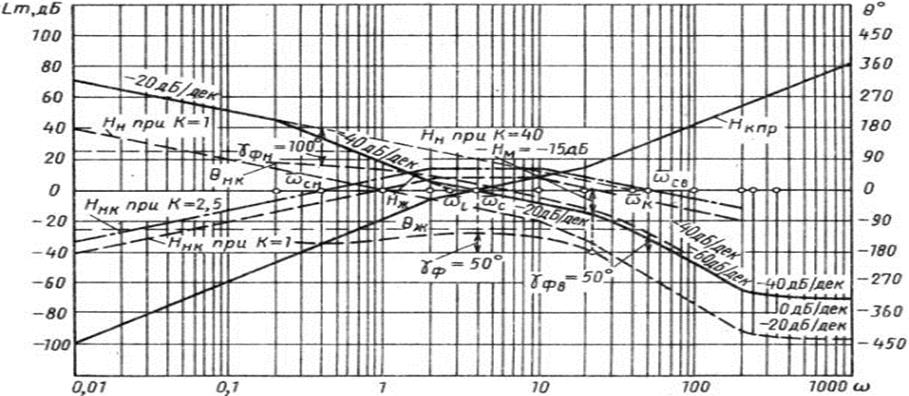
Рис. 10.3. Логарифмические амплитудные и фазовые характеристики дискретно-непрерывной системы с микроЭВМ «Электроника-60», на которой реализована параллельная программа коррекции
На рис. 10.3 изображены Hж (ω̄) и θж (ω̄). В отличие от ранее рассмотренного примера 10.1, желаемая амплитудная характеристика имеет дополнительный участок с наклоном – 40 дБ/дек в диапазоне 20 < ω̄ < 50. Запасы устойчивости синтезированной системы имеют следующие значения: γФ° = 50° и – HM = – 15 дБ. Жирной сплошной линией на рис. 10.3, согласно формуле (10.11), построена характеристика Hк пр (ω̄).
С целью проверки запасов устойчивости внутреннего контура на рис. 10.3 тонкой штриховой линией изображена характеристика Hнк (ω̄) = Hн (ω̄) + Hк пр (ω̄) при K = 1. По этой характеристике построена фазовая характеристика θнк (ω̄). Задаваясь запасом устойчивости по фазе γФв° = 50° и поднимая Hнк (ω̄) до уровня K = 2,5, получим амплитудную характеристику внутреннего контура системы (штрихпунктирная линия). При этом видно, что γФн° = 100°. Полученные значения γФв° и γФн° гарантируют высокую степень устойчивости замкнутого внутреннего контура.
Используя характеристику Hк пр (ω̄), находим передаточную функцию параллельного корректирующего устройства в виде:

Подставляя в выражение (10.12)  получим:
получим:
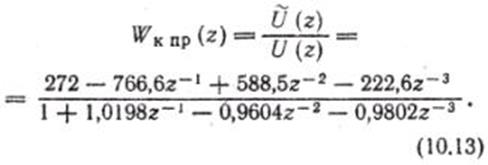
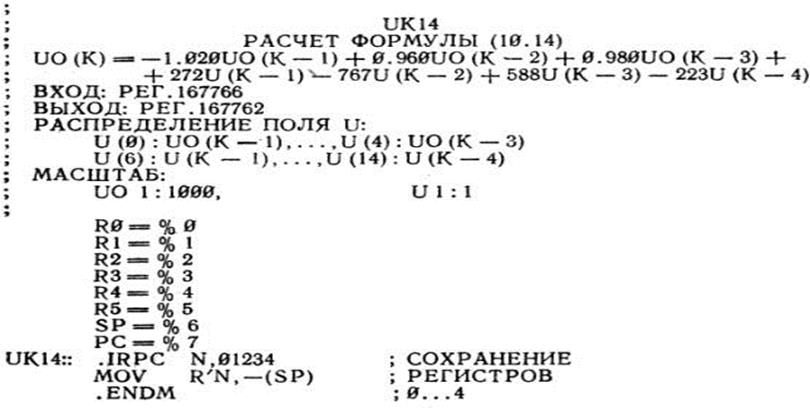
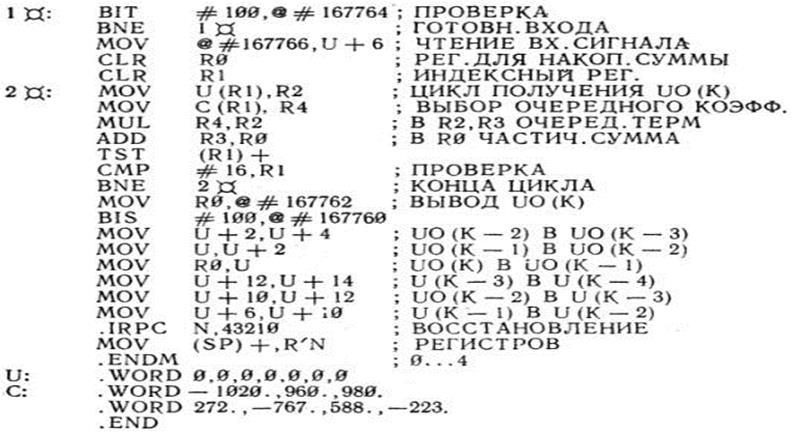
Соответствующее разностное уравнение в реальном масштабе времени имеет вид:
ũк = – 1,0198 ũк – 1 + 0,9604 ũк – 2 + 0,9802 ũк – 3 + 272 uк – 1 – 766,6 uк – 2 + 588,5 uк – 3 – 222,6 uк – 4.
(10.14)
Данное уравнение реализовано в виде программы на микроЭВМ «Электроника-60» на языке ассемблер.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.