

Пример.
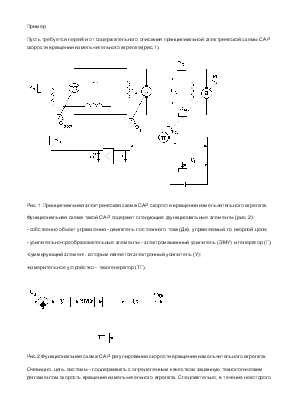
Пусть требуется перейти от содержательного описания принципиальной электрической схемы САР скорости вращения измельчительного агрегата(рис.1).
Рис. 1 Принципиальная электрическая схема САР скорости вращения измельчительного агрегата.
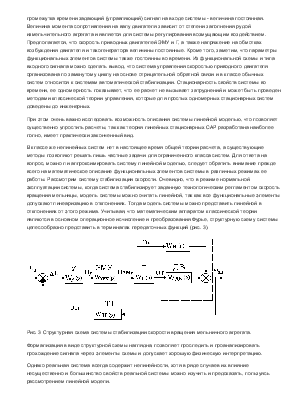
Функциональная схема такой САР содержит следующие функционалъные элементы (рис. 2):
- собственно объект управления - двигатель постоянного тока (Дв), управляемый по якорной цепи;
- усилительно-преобразовательные элементы - электромашинный усилитель (ЭМУ) и генератор (Г);
-суммирующий элемент, которым является электронный усилитель (У);
-измерительное устройство - тахогенератор (ТГ).
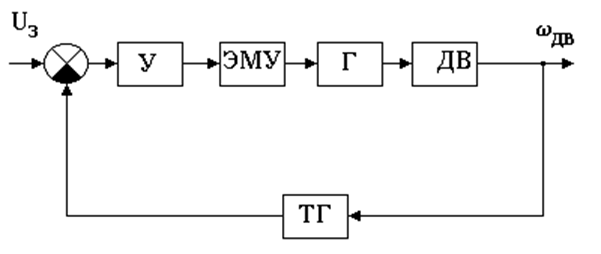
Рис.2 Функциональная схема САР регулирования скорости вращения измельчительного агрегата.
Очевидно, цель системы - поддерживать с определенным качеством заданную технологическим регламентом скорость вращения измельчительного агрегата. Следовательно, в течение некоторого промежутка времени задающий (управляющий) сигнал на входе системы - величина постоянная. Величина момента сопротивления на валу двигателя зависит от степени заполнения рудой измельчительного агрегата и является для системы регулирования возмущающим воздействием. Предполагается, что скорость приводных двигателей ЭМУ и Г, а также напряжение на обмотках возбуждения двигателя и тахогенератора величины постоянные. Кроме того, заметим, что параметры функциональных элементов системы также постоянны во времени. Из функциональной схемы и типа входного сигнала можно сделать вывод, что система управления скоростью приводного двигателя организована по замкнутому циклу на основе отрицательной обратной связи и в классе обычных систем относится к системам автоматической стабилизации. Стационарность свойств системы во времени, ее одномерность показывает, что ее расчет не вызывает затруднений и может быть проведен методами классической теории управления, которые для простых одномерных стационарных систем доведены до инженерных.
При этом очень важно исследовать возможность описания системы линейной моделью, что позволяет существенно упростить расчеты, так как теория линейных стационарных САР разработана наиболее полно, имеет практически законченный вид.
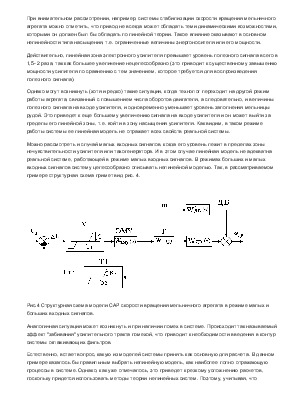
В классе же нелинейных систем нет в настоящее время общей теории расчета, а существующие методы позволяют решать лишь частные задачи для ограниченного класса систем. Для ответа на вопрос, можно ли аппроксимировать систему линейной моделью, следует обратить внимание прежде всего на математическое описание функциональных элементов системы в различных режимах ее работы. Рассмотрим систему стабилизации скорости. Очевидно, что в режиме нормальной эксплуатации системы, когда система стабилизирует заданную технологическим регламентом скорость вращения мельницы, модель системы можно считать линейной, так как все функциональные элементы допускают линеаризацию в отклонениях. Тогда модель системы можно представить линейной в отклонениях от этого режима. Учитывая, что математическим аппаратом классической теории являются в основном операционное исчисление и преобразования Фурье, структурную схему системы целесообразно представить в терминалах передаточных функций (рис. 3).
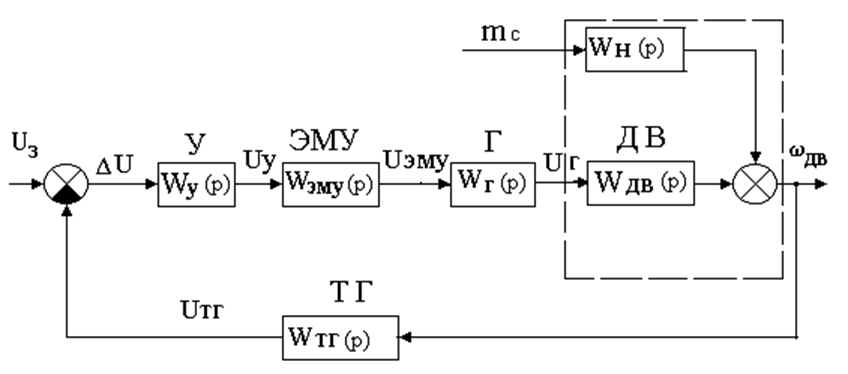
Рис. 3 Структурная схема системы стабилизации скорости вращения мельничного агрегата.
Формализация в виде структурной схемы наглядна, позволяет проследить и проанализировать прохождение сигнала через элементы схемы и допускает хорошую физическую интерпретацию.
Однако реальная система всегда содержит нелинейности, хотя в ряде случаев их влияние несущественно и большинство свойств реальной системы можно изучить и предсказать, пользуясь рассмотрением линейной модели.
При внимательном рассмотрении, например, системы стабилизации скорости вращения мельничного агрегата можно отметить, что привод не всегда может обладать теми динамическими возможностями, которыми он должен был бы обладать по линейной теории. Такое влияние оказывают в основном нелинейности типа насыщения, т.е. ограниченные величины энергоносителя или его мощности.
Действительно, линейная зона электронного усилителя превышает уровень полезного сигнала всего в 1,5- 2 раза, так как большее увеличение нецелесообразно (это приводит к существенному завышению мощности усилителя по сравнению с тем значением, которое требуется для воспроизведения полезного сигнала).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.