Практическое занятие 5.
Тема: Наблюдаемость в линейных системах
управления.
Пусть система управления описывается следующими уравнениями:
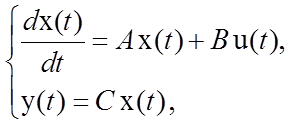 (5.1)
(5.1)
где
![]() ,
, ![]() ,
, ![]() – непрерывные матрицы порядка
– непрерывные матрицы порядка ![]() ,
, ![]() ,
, ![]() соответственно;
соответственно; ![]() –
–
![]() -вектор выходных (измеряемых) координат системы
управления.
-вектор выходных (измеряемых) координат системы
управления.
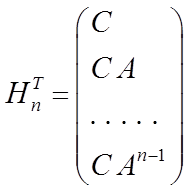
В случае, если система (5.1) стационарна и ![]() , то матрица наблюдаемости
, то матрица наблюдаемости ![]() примет вид
примет вид
 (5.2)
(5.2)
или
 ,
,
а
формула (5.2) при ![]() :
:
 .
.
Пример.
Пусть стационарная линейная система управления описывается следующими дифференциальными уравнениями в нормальной форме:
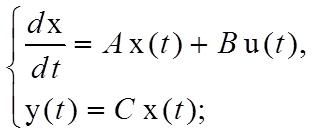
где 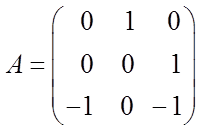 ;
;  ;
;
 .
.
Исследовать управляемость и наблюдаемость системы.
Решение.
Построим матрицу управляемости исходной системы
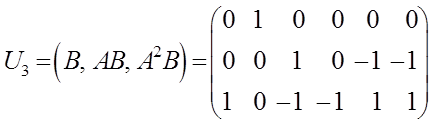 ,
,
где  ;
;  .
.
Матрица ![]() содержит линейно независимые столбцы,
например, 1-ый, 2-ой и 3-ий. Следовательно,
содержит линейно независимые столбцы,
например, 1-ый, 2-ой и 3-ий. Следовательно,  и
система управляема.
и
система управляема.
Матрица наблюдаемости
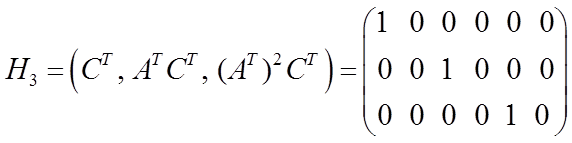 ,
,
где  ;
;  .
.
В матрице ![]() 1-ый, 3-ой и 5-ый столбцы линейно
независимые. Таким образом,
1-ый, 3-ой и 5-ый столбцы линейно
независимые. Таким образом,  и система управления
наблюдаема, т.е. по измеряемой фазовой координате
и система управления
наблюдаема, т.е. по измеряемой фазовой координате  путем
несложных преобразований можно восстановить ненаблюдаемые фазовые координаты
путем
несложных преобразований можно восстановить ненаблюдаемые фазовые координаты ![]() и
и ![]() .
.
Задачи.
1. Стационарная линейная система управления описывается следующими дифференциальными уравнениями в нормальной форме:
где  ;
;  ;
;
 .
.
Исследовать управляемость и наблюдаемость системы. Если система не наблюдаема, то определить ненаблюдаемые фазовые координаты.
2. Стационарная линейная система управления описывается следующими дифференциальными уравнениями в нормальной форме:
где  ;
;  ;
.
;
.
Исследовать управляемость и наблюдаемость системы. Если система ненаблюдаема, то определить ненаблюдаемые фазовые координаты.
Список рекомендуемой литературы.
1. Атанс М., Фалб П. Оптимальное управление. М., «Машиностроение», 1968.
2. Беллман Р., Калаба Р. Динамическое программирование и современная теория управления. –М.: Наука, 1969.
3. Болтянский В.Г. Математические методы оптимального управления. –М.: Наука, 1968.
4. Брайсон А., Хо Ю-ши Прикладная теория оптимального управления. Оптимизация, оценка и управление. М.: Мир, 1972. –544 с.
5. Нефедов Ю.М. Теория управления. Учеб. пос. –Луганск: Изд-во ВНУ им. В.Даля, 2003. – 228 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

