Стартовый угол
Задает угол, в котором начинается Траектория. При нажатии на кнопку Просмотр Начальная точка будет отмечена стрелкой.
Угол
Задается угол наклона растровых проходов к оси X.
![]()
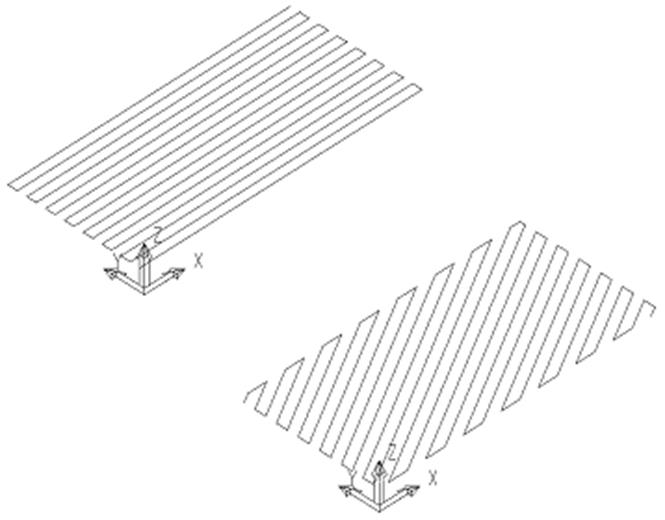
Перпендикулярные ходы
Если этот флаг установлен, создается второй растровый проход, перпендикулярный к первому.
Откройте диалоговое окно Чистовая обработка и выберите стратегию Растр.
Задайте Допуск 0.1 мм и Припуск 0.0 мм.
Задайте Угол 90.
Вычислите шаг По высоте
гребешка ![]() .
.
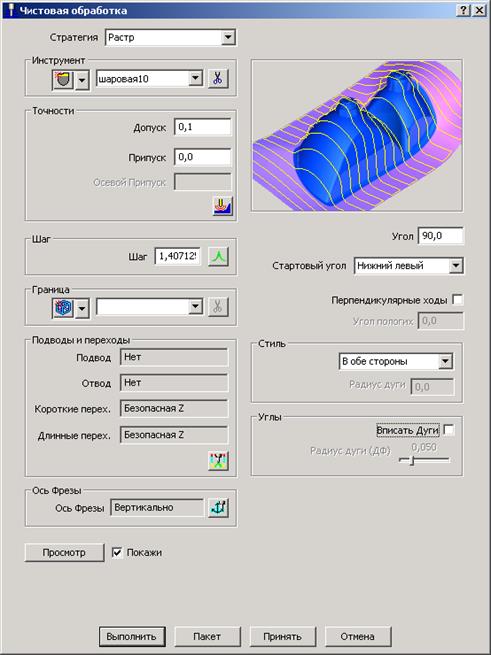
Нажмите Вычислить и Принять.
Должна получится следующая траектория.
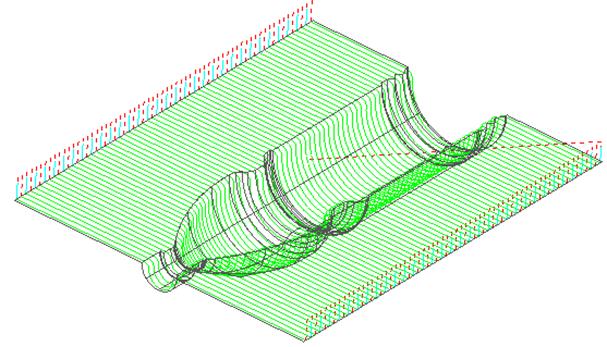
Созданную траекторию переименуйте в Чист_растр_пр0.
Выполните анимацию траектории.

При обработке стратегией 3D Смещение шаг между соседними проходами откладывается по длине 3D поверхности, обеспечивая постоянство расстояния между соседними проходами фрезы как на пологих поверхностях, так и на отвесных участках модели.
Спираль – траектория создается в форме 3D Спирали.
Максимальное число – параметр, указывающий максимальное количество проходов от задающего 3D контура.
Откройте диалоговое окно Чистовая обработка и выберите стратегию 3D Смещение.

Задайте Допуск 0.1 мм и Припуск 0.0 мм.
Вычислите шаг По высоте гребешка ![]() .
.
Убедитесь, что опция Спираль включена.
Нажмите Выполнить и Принять.
Созданную траекторию переименуйте в Чист_3дсмещ_спир_пр0.
Создайте ещё одну траектории обработки с использованием стратегии 3D Смещение.


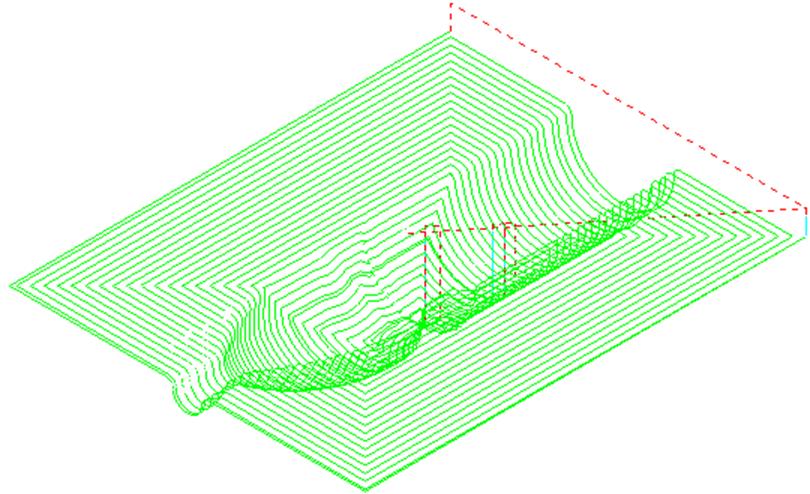
Выключите опцию создания спиральной траектории Спираль и задайте максимальное число проходов, равное 30.
Нажмите Выполнить и Принять.
Созданную траекторию переименуйте в Чист_3дсмещ_30пр_пр0.
Сравните полученную траекторию с предыдущей.
Обратите внимание, что при выключенной опции Спираль инструмент перемещается между соседними проходами на безопасной высоте (пунктирные линии).
Группа стратегий чистовой обработки, создающая траекторию движения инструмента путем объемного проецирования на модель одного из стандартных шаблонов.
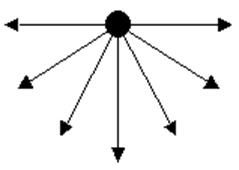
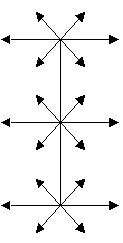
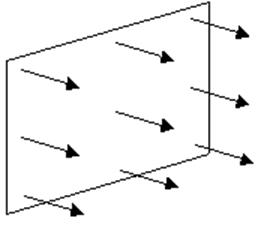
Существует три стандартных шаблона проецирования:
|
Проецирование от точки |
Проецирование от линии |
Проецирование от плоскости |
|
|
|
|
Наиболее простой способ понять технологию получения траектории проецированием – представить каждый шаблон, как источник света. Точка может рассматриваться как простая лампочка, Линия может рассматриваться как люминесцентная лампа, а Плоскость – как источник рассеянного света.
При проекционной обработке используются понятия Азимута и Элевации.
Азимут – угол измеряемый в плоскости XY против часовой стрелки от оси X.
Элевация – угол, измеряемый в плоскости оси Z от плоскости XY.

Стратегия Проекция от линии позволяет обработать поверхности, полученные вращением образующей кривой вокруг оси. При этом линия проекции и ось вращения должны совпадать.
В нашем случае формообразующая поверхность стенки флакона является поверхностью вращения.
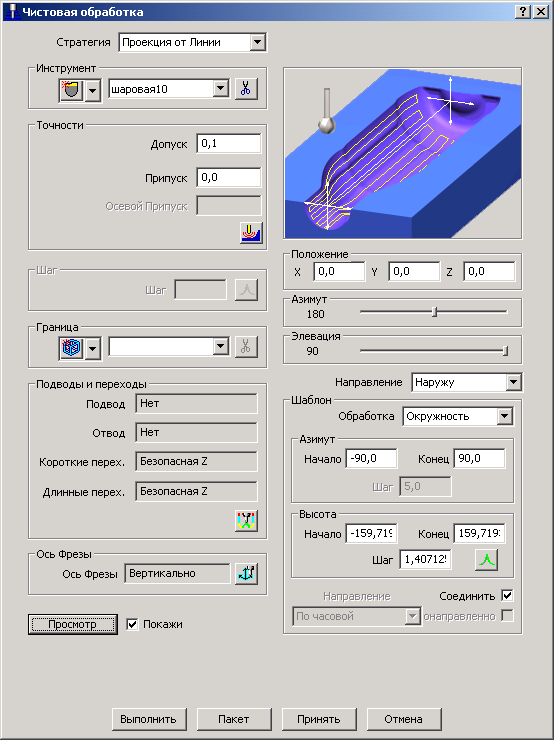
Откройте диалоговое окно Чистовая обработка и выберите стратегию Проекция от линии.
 .
.
В области Положение введите 0 0 0.
При помощи движков задайте значения Азимута и Элевации равные 180 и 90 градусов соответственно. Для точного указания значений можно воспользоваться стрелками вправо и влево на клавиатуре.
Задайте Направление проецирования Наружу.
В качестве Шаблона проецирования выберите Окружность.
Включите опцию Покажи и нажмите кнопку Просмотр.
На экране появится схематичное изображение Шаблона проецирования. Стрелками указывается направление проецирования.
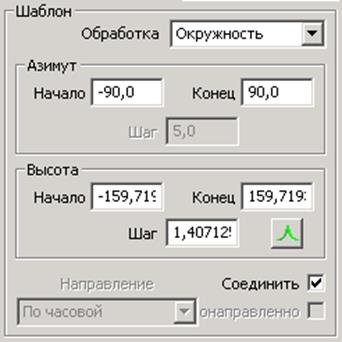
Очевидно, что нам необходимо ограничить область проецирования Шаблона плоскостью XY. Для этого задайте значения Азимута как показано ниже.

Нажмите кнопку Просмотр.
Параметр Высота задает «ширину» Шаблона проецирования.
Задайте параметры Начало и Конец как значения максимального и минимального габаритов модели вдоль оси X.
Вычислите шаг По высоте
гребешка ![]() .
.
Нажмите Выполнить и Принять.
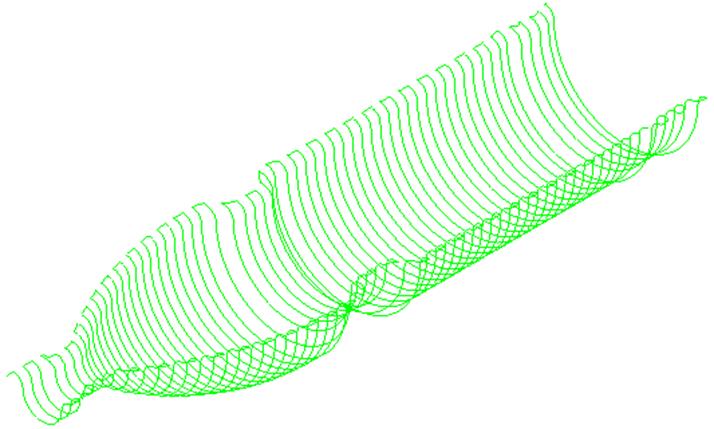
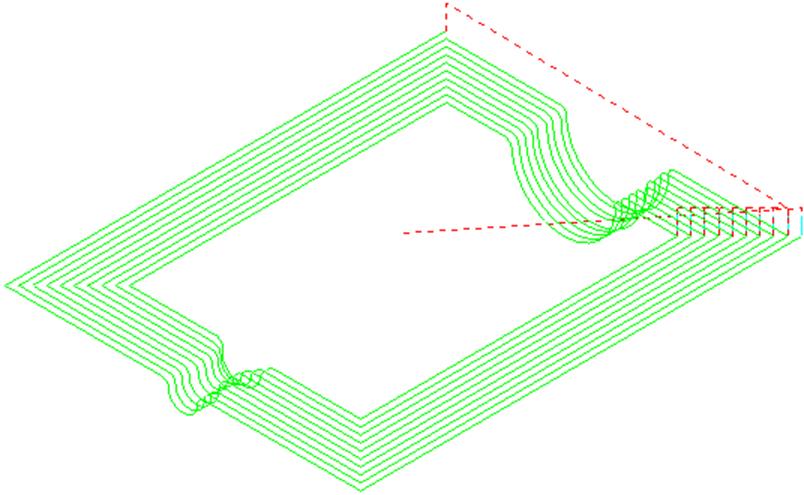
Обратите внимание на то, что траектория обрабатывает только поверхность вращения, а пологие участки остаются незатронутыми.
Созданную траекторию переименуйте в Чист_пр_лин_пр0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.