![]()
![]() h1=h1 * μS ; м AB=AB * μS , м
h1=h1 * μS ; м AB=AB * μS , м
![]() h2=h2 * μS ;
м
h2=h2 * μS ;
м
![]()
![]()
![]() Если получается со знаком “+” , то
предварительно выбранное направление указанно верно, а если со знаком ”-“, то направление
нужно поменять на противоположное.
Если получается со знаком “+” , то
предварительно выбранное направление указанно верно, а если со знаком ”-“, то направление
нужно поменять на противоположное.
∑М3(B)= - R30τ * BC – PПС * h3 + MИ3 – G3 * h4 – PB3 * h5 =0
R30τ=(– PПС * h3 + MИ3 – G3 * h4 – PB3 * h5)/BC
![]()
![]() h3=h3 * μS ; м h5=h5 * μS ; м
h3=h3 * μS ; м h5=h5 * μS ; м
![]()
![]() h4=h4 * μS ; м BC=BC * μS , м
h4=h4 * μS ; м BC=BC * μS , м
При определении нормальных составляющих R21n и R30n необходимо построить план сил для соответствующей группы. Для построения планов сил необходимо вычислить масштаб построения плана сил.
μP=Pmin / hmin=H/мм
Если у нас заданныесилы реакции равны:
G2=90H РПС=3000Н μP= 40H/4мм=10H/мм
G3=40H R21τ=400H PПС=3000/10=300мм и т.д.
PИ2=1100H R30τ=1600H
PИ3=1400Н
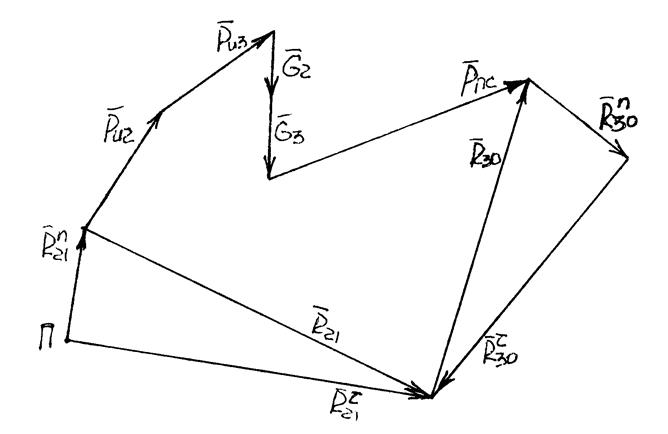
Основным условием равновесия произвольной плоской системы сил является следующее уравнение: ∑F=0.
Применительно к рассматриваемой системе геометрическая система сил будет вычисляться так:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ∑F= R21n + R21τ + PИ2 + G2 + G3 + PИ2 + РПС + R30n + R30τ
∑F= R21n + R21τ + PИ2 + G2 + G3 + PИ2 + РПС + R30n + R30τ
При построении планов сил следует, пользоваться следующими рекомендациями:
1. Построение планов сил желательно, начинать с одной из известных тангенциальной составляющей (например R21т ), затем силы, действующие в рассматриваемой системе, можно прикладывать в различном порядке, а закончить план построения второй тангенциальной составляющей.
2. В полученном разрыве следует приложить неизвестные нормальные составляющие (R21n и R30n),
3. Каждый предыдущий вектор должен служить началом для вектора последующего.
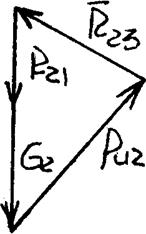
План сил группы 2 построенный в масштабе.
|
|
|||
|
Рис.38. |
![]()
![]()
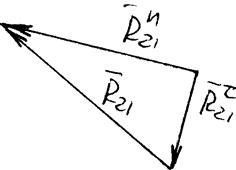
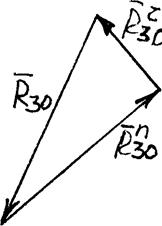
![]() Вычисляются полные реакции:
Вычисляются полные реакции:
![]()
![]()
![]() R21=R21n+R21τ
R21=R21n+R21τ
R30=R30n+R30τ
|
|
|
|||
|
Рис.39. |
||||
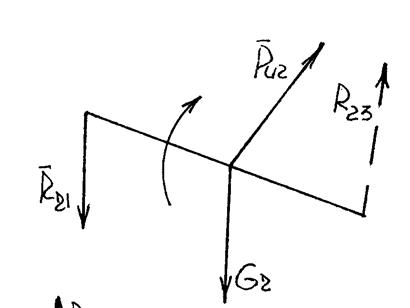
Далее определяем полную реакцию в шарнире "В"
R23= - R32.
Для нахождения давления в шарнире "В" необходимо построить план сил отдельно для второго или третьего. Желательно строить для того звена к которому приложено меньшее число сил. Запишем условие равновесия звена 2 .
∑F= R21 + G2 + PИ2 + R23
|
|
|
||||||
|
Рис.40. |
|||||||
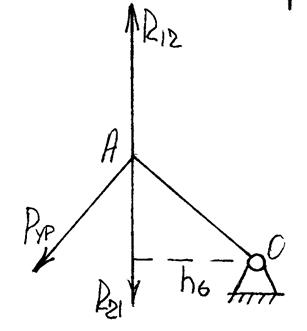
Далее следует перейти к рассмотрению условия равновесия ведущего звена. К ведущему звену I прикладываются все действующиена него силы.
|
|
|
Рис.41. |
К первому звенусостороны 2 звена будет приложена сила R12= - R21. Величина и направления этой силы ранее определены. В (.)А следует приложить уравновешиваемую силу (PУР), которая способна уравновесить всю систему действующих на механизм внешних сил. Уравновешивающую силу условно прикладываютк (.) А перпендикулярно ведущему звену ОА и направляют таким образом, чтобы создаваемый ею момент, уравновешивал момент создаваемый реакцией R12.
Затем составляем уравнение моментов всех сил действующих на звено I относительно центра О (Рис.41.).
∑M(0)= - R12 * h6 + PУР * ОА = 0
РУР= ( R12 * h6)/ОА
Уравновешивающий момент в звене I:
МУР=РУР * lОА(м)=Н*м
Мощность двигателя, который должны выбрать:
NДВ=МУР * ω ; Вт
Определение уравновешивающей силы с помощью жесткого рычага Жуковского.
Для определения уравновешивающей силы с помощью жесткого рычага Жуковского необходимо план скоростей механизма повернуть на угол 90 градусов относительно полюса по направлению вращения механизма и в соответствующих точках плана, /т.е. повернутого/ приложить действующие внешние силы, в том числе и моменты сил инерции, и моменты сил полезного влияния.Из условия равновесия алгебраическая сумма моментов всех действующих внешних сил, составленных относительно полюсов плана скоростей,определяет величину уравновешивающейсилы./ разница между должна быть не более 10%/
Замечания:
I. Применение рычага Жуковского позволяет определить искомые силы с помощью только одного уравнения моментов всех сил, действующих на механизм, относительно полюса плана скоростей.
II. При применении рычага Жуковского план скоростей строится повернутым. Можно пользоваться и не повернутым планом. В этом случав необходимо все силы при их переносе на план скоростей повернуть в одну и туже сторону на 90°.
III. Метод Жуковского является геометрической ннтерпритацией уравнений, позволяющий с исключительной простотой определять приведённые силы и моменты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.