1. Постановка задачи для повышения качества работы САР
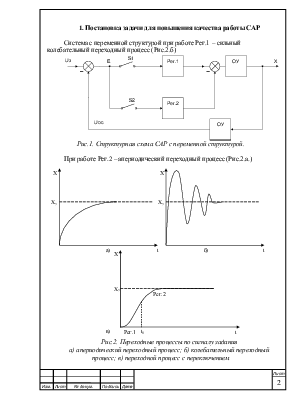
Система с переменной структурой при работе Рег.1 – сильный колебательный переходный процесс (Рис.2.б)
 Рис.1. Структурная схема
САР с переменной структурой.
Рис.1. Структурная схема
САР с переменной структурой.
 |
а) апериодический переходный процесс; б) колебательный переходный процесс; в) переходной процесс с переключением
При больших ошибках рассогласования e выбирается структура САР с Рег.1.
В момент времени t1 подхода выхода X к заданному значению Xз Рег.1 отключается, подключается Рег.2 (Рис.2.в.). В результате можно ожидать, что выход X плавно без колебаний подойдет к заданному значению. В результате переходной процесс качественным и за минимально возможное время.
При раннем переключении переходной процесс будет затянутым, при позднем – возникнут колебания и перерегулирование.
Принцип такой САР надо рассматривать и в переходном процессе по нагрузке. С указанными регуляторами 1 и 2 мы имели бы следующие виды переходных процессов:
 |
Рис.3. Переходной процесс по возмущению.
а) колебательный процесс; б) апериодический процесс; в) САР с переменной структурой.
Здесь, независимо от отклонения выходной величины от заданного значения, первым должен быть включен Рег.1, а при подходе выходной величины к заданному значению заблаговременно надо переключиться на Рег.2.
Так как небольшие колебания всегда присутствуют в реальных системах, то переключаться с Рег.2 на Рег.1 надо, если отклонение существенное.
Вытекает следующая программа моделирования такой САР:
1. По заданному конкретному ОУ выбрать структуру и рассчитать параметры регуляторов 1 и 2.
2. Построить схему
3. Выбрать структуру САР с переменной структурой. Конкретизировать алгоритм ее переключения
4. Провести моделирование и уточнить работу САР с переменной структурой.
Рег.2 как последний подключаемый работает в конце динамики и в течение всей статики в установившемся режиме, поэтому в хороших САР для недопущения статических ошибок он должен быть с интегральной составляющей, т.е. ПИ или же ПИД.
В установившемся режиме выходное напряжение регулятора с ПИ или ПИД-законами полностью определяется интегральной составляющей, т.е. в момент последнего переключения t2 интегральная составляющая из «предыстории» переходного процесса, который формировался обоими регуляторами, должна быть чуть меньше, чем значение, которое необходимо для окончания переходного процесса.
Очевидно, одним из вариантов достижения такого значения интегральной составляющей является такое сочетание параметров Рег.1(в котором интегрирование производится не очень интенсивно, т.е. постоянная интегрирования имеет большее значение).
Также можно сформировать требования ко 2-му регулятору, работающему в установившемся режиме и малые отклонения, приходящиеся на долю этого регулятора тоже должны устранятся за min время – можно предположить, что настройка этого регулятора будет на СО.
2. Расчет и моделирование заданной САР при настройке на СО
Задание:
Структура ОУ как неизменяемой части САР:
![]()
Рис.4. Структура ОУ, как неизменяемой части САР
Для настройки контура на СО надо выбирать ПИ-регулятор со следующей передаточной функцией
|
k1 |
T1 |
k2 |
T2 |
k3 |
|
19.7 |
0,106 |
0,44 |
0,106 |
0,106 |
Задачей расчета является определение настроек регулятора, а именно коэффициент передачи и постоянную времени Тр. Тогда структурная схема синтезируемой САР получается (Рис.1)
Передаточная функция замкнутой САР будет следующей:



Получили уравнение 3-го порядка, следовательно его нужно сравнить с передаточной функцией фильтра Баттерворта 3-го порядка

В
качестве малой некомпенсируемой постоянной времени нужно применить наименьшую
постоянную времени Т1, следовательно ![]()
Отсюда можно записать 2 системы равенств:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.