Третий путь – создание автономного ЯМ самый трудоёмкий, так как требует разработки собственного компилятора. Однако он и самый перспективный, потому что не ограничивает разработчика рамками уже существующего базового языка. Именно этот путь был выбран при создании наиболее мощного, эффективного и универсального языка моделирования и описания аппаратуры VHDL, принятого ныне в качестве неофициального мирового стандарта.
 Рассмотрим несколько примеров наиболее популярных
языков моделирования. Более подробно они будут обсуждаться в третьей теме, а
здесь мы собираемся получить только «общее впечатление».
Рассмотрим несколько примеров наиболее популярных
языков моделирования. Более подробно они будут обсуждаться в третьей теме, а
здесь мы собираемся получить только «общее впечатление».
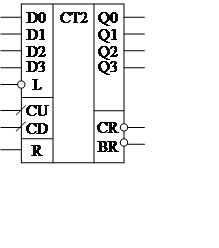
В качестве объекта описания возьмём двоичный реверсивный счётчик 555ИЕ7,графическое изображение которого показано справа. Напомним, что он имеет четыре режима работы: асинхронный сброс (наиболее приоритетная команда), асинхронная параллельная загрузка, счёт на увеличение (счёт вверх) и счёт на уменьшение (счёт вниз).
На рис.3 приведена его модель, построенная с помощью языка моделирования PML пакета автоматизированного проектирования PCAD.
555IE7()
INPUT D0,D1,D2,D3,L,CU,CD,R;
OUTPUT Q0,Q1,Q2,Q3,CR,BR;
LOCAL Q[4];
{
IF (R=="1") Q="0x0" (2,2,"D","D"); /* сброс */
ELSE
{ IF (L=="0") Q=[D3,D2,D1,D0] (4,4,"D","D"); /* загрузка */
IF (L=="1")&&(CU=="/") Q=Q+"0X1" (8,8,"D","D"); /* счёт вверх */
IF (L=="1")&&(CD=="/") Q=Q+"0XF" (8,8,"D","D"); /* счёт вниз */
}
CR=~(Q[0]&Q[1]&Q[2]&Q[3]&~CU) (8,10,"D","D");
BR=~(~Q[0]&~Q[1]&~Q[2]&~Q[3]&~CD) (8,10,"D","D");
Q0=Q[0] (0,2,"D","D");
Q1=Q[1];
Q2=Q[2];
Q3=Q[3];
}
Рис.3. PML-модель двоичного реверсивного счётчика 555IE7
Структура PML-модели состоит из двух частей. Первая часть (раздел описания) содержит заголовок модели и описание внешних входных и выходных сигналов. Здесь же вслед за ключевым словом LOCAL можно объявить локальную переменную или внутреннюю шину, как в нашем примере: Q[4]. Они используются для хранения текущего состояния моделируемого компонента.
Вторая часть модели (исполняемый раздел) заключена в фигурные скобки и содержит набор исполняемых операторов. В конце каждого оператора может присутствовать необязательный PCL-список, заключённый в круглые скобки. В нём указываются задержки переключения выхода из 0 в 1 и в обратном направлении.
Например, в режиме параллельной загрузки (L=="0") задержка срабатывания выходов Q0…Q3 составит 4 условные единицы времени. В PCAD’е по умолчанию условная единица равна 1нс. Если PCL-список отсутствует, то задержка принимается равной 1нс.
Два последних параметра в PCL-списке задают логическую силу выхода, косвенно отражающую его нагрузочную способность. В пакете PCAD существуют четыре уровня логической силы: S, D, R, Z. Они перечислены в порядке убывания. Выход с силой S – самый мощный. Этот простой механизм оказывается достаточным для разрешения конфликтов на шинах.
Язык PML не имеет внешней шины, поэтому при выдаче результатов приходится внутреннюю шину преобразовывать в соответствующее число одиночных узлов (проводников). В нашем примере шина Q[4] «раскладывается» на четыре одиночных сигнала Q0…Q3. Это делается с помощью последних четырёх операторов присваивания.
Для демонстрации возможностей языка PML первому из них приписан PCL-список:
Q0=Q[0] (0,2,"D","D");
Указанные в нём задержки будут просуммированы с теми, что указаны при вычислении шинного сигнала. Например, при параллельной загрузке данных суммарная задержка при переключении выхода Q0 вверх составит 4нс (4нс+0нс), а переключение вниз будет осуществляться с задержкой 6нс (4нс+2нс).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.