Скремблирование применяется для более равномерного распределения энергии в полосе частот радиоканала. Оно позволяет также эффективно восстанавливать режим синхронизации в паузе модуляции и необходимо для устранения возможности случайного появления цифровых последовательностей, соответствующих словам синхронизации, при передаче постоянно изменяющихся во времени цифровых сигналов. В основных кадрах А и В слова синхронизации Sync A, Sync В и биты S сервисной службы (всего 12 бит в начале каждого основного кадра) не перемежаются и не скремблируются. Операции скремблирования подвергаются 308 бит четырех звуковых блоков каждого из основных кадров (рис. 18.11). Скремблирование выполняется объединением цифровых потоков основных кадров А и В с псевдослучайной последовательностью, генерируемой с помощью 9-разрядного регистра сдвига с обратной связью (скремблирующий генератор на рис. 18.11). Генераторный полином имеет вид
Р(х) = х9 + х4 + 1.
Генератор создает двоичную последовательность длиной 29 - 1 = = 511 битов, из которых 308, имеющих наименьшую вероятность имитации синхронизирующего слова основного кадра с кодом Баркера, используются для кодирования. Последовательность в 308 битов определяется начальным словом инициализации вида r8, r7, r6,..., r0 = 010111101. Биты каждого основного кадра А и В, начиная с 13-го, суммируются по модулю 2 с псевдослучайной последовательностью в следующем порядке: биты основного кадра А суммируются с содержимым ячейки r0, биты основного кадра В суммируются с содержимым ячеек г3 и r0 (рис. 18.11). После окончания скремблирования одной пары кадров происходит повторный старт генератора псевдослучайной последовательности от указанного выше слова инициализации и затем начинается скремблирование новой пары основных кадров А и В, также начиная с 13-го бита.
Далее скремблированный поток данных А' и В' подвергается дифференциальному кодированию ДК (рис. 18.10,6^, чтобы при радиоприеме можно было использовать не только синхронную демодуляцию, но
и более простую разностную демодуляцию. Для этой цели два скремблированных потока А', В' в ДК объединяются, образуя две новые последовательности А" и В" на следующей основе:
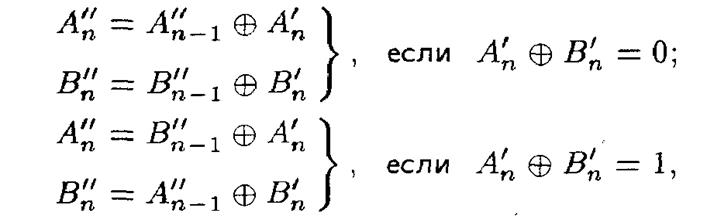
где Å – "исключающее ИЛИ"; Аn, Вn – логическое состояние в момент n; An-1, Вn-1 – логическое состояние в момент n – 1, т.е. на бит раньше.
Два цифровых потока после дифференциального кодирования А" и В" каждый по 10,24 Мбит/с переключают фазы двух ортогональных несущих sinwt и coswt, которые затем суммируются (см. рис. 18.10,6), образуя сигнал с модуляцией 4-ФМ (ФМ с четырьмя положениями фазы несущего колебания). Четырехпозиционная ФМ реализуется в данном случае с помощью двух модуляторов M1 и М2, каждый из которых является двухпозиционным. Временная зависимость и векторная диаграмма изменения фазы сигнала на выходе модулятора 2-ФМ (2PSK) (M1 или M2) представлены на рис. 18.10,в,г. В модуляторах M1 и М2 двум возможным символам 0 или 1 цифровых сигналов А" или В" на входе ставятся в соответствие два значения фазы несущей, сдвинутые друг относительно друга на 180°. После суммирования выходных сигналов m1 и М2, к которым подведены ортогональные несущие, получаем ФМ с четырьмя состояниями фазы (4-ФМ или 4PSK). Векторная диаграмма состояний фаз в зависимости от сочетания значения пар символов (0 и 1) двух цифровых сигналов А" и В" показана на рис. 18.10,а. Временная функция сигнала на выходе сумматора Е модулятора 4PSK описывается выражением

где Е – постоянная энергия сигнала Si(t); w0 = 2pn/T – круговая частота; n > 0 – целое число; Т – длительность символа; i = 0, 1, 2,...,; М – 1 (М – число состояний фазы)
 |
где τ = (2/20,48) • 10–6 с – длительность двух битов (двойной бит); f – частота.
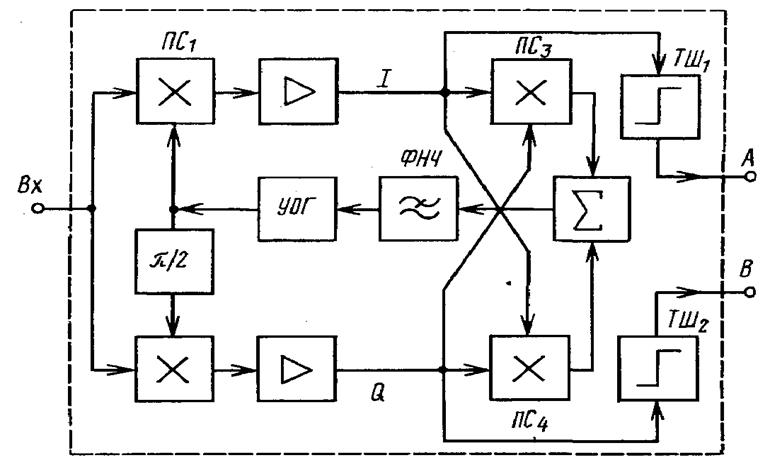
Рис. 18.12. Демодуляция сигнала 4-ФМ с устройством восстановления несущей по методу Костаса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.