|
Стр. |
||
|
8. |
Автоматизация очистных и подготовительных работ. |
|
|
8.1. |
Автоматизация оборудования очистных забоев. |
|
|
8.2. |
Автоматизация оборудования подготовительных забоев. |
|
|
8.3. |
Автоматизация конвейерного транспорта. |
|
|
8.4. |
Автоматизация контроля за состоянием рудничной атмосферы. |
|
|
8.5. |
Потребное количество аппаратуры автоматизации. |
Настоящим проектом для автоматизации очистных работ предусматривается использовать механизированный комплекс фирмы «Джой». Для автоматизации очистного комбайна 4LS-5 предусматривается применение системы автоматизированного компьютерного управления – система серии №7 “Hydraulic Outpit and SLR Tuqqeriq”.
Управление осуществляется дистанционно или радиодистанционно, через главный электронный блок “Hoqt”. Кроме управления гидравлической и тиристорными системами подачи комбайна, выполняются другие функции:
1. Контролем пульта дистанционного управления отслеживаются:
- аналоговые данные;
- данные управления гидросистемой;
- данные управления подач комбайна;
- данные об экстренных остановках.
2. Контролем селектор пультов осуществляется:
- блокировка неисправных пультов дистанционного управления;
- управление обмотками электромагнитных клапанов гидросистемы;
- задание последовательности работы и приоритеты;
- синхронизация и задача последовательности работы.
3. контроль температуры режущего органа:
- управление токами двигателей режущего органа, насосов, подач;
- обеспечивает защиту двигателей насосов, режущего органа и подач через информацию от модулей КТД;
- следит за перегревом двигателей;
- вырабатывает диагностические данные и передает их на дисплей.
Для автоматизации проходческих комбайнов используется аппаратура дистанционного управления. Эта аппаратура предназначена для управления всеми электрическими и гидравлическими функциями комбайна с пульта дистанционного управления или основными механизмами. Аппаратура дистанционного управления комбайна ГПКС АДУ-4 состоит из пульта управления, релейной панели, блока запуска и служит для управления основными механизмами комбайна.
Техническая характеристика аппаратуры АДУ-4.
|
Напряжение питания, В |
380/660 |
|
Потребляемая мощность, Вт. |
150 |
|
Число команд с дистанционного управления |
До 24 |
|
Максимальное расстояние от пульта управления до комбайна, м. |
10/20 |
Структурная схема аппаратуры АДУ-4 показана на рисунке 8.1.
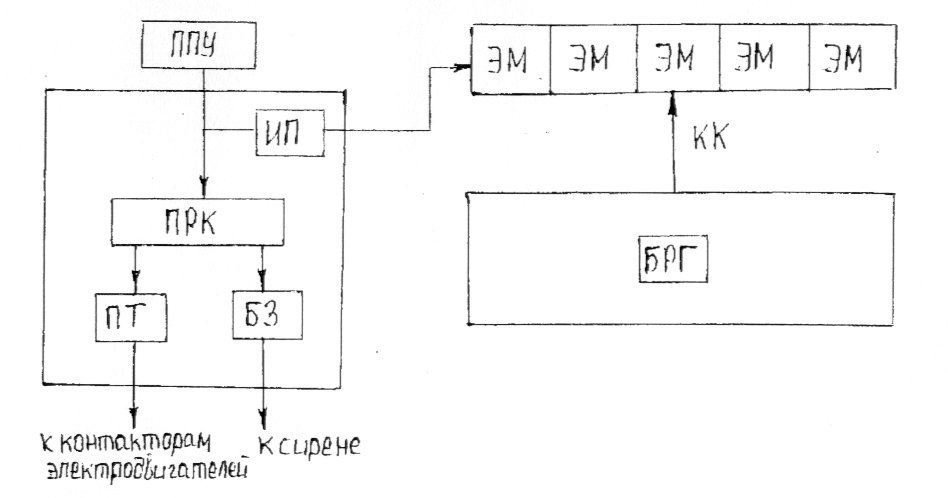
Рисунок 8.1. Структурная схема аппаратуры АДУ-4.
ППУ – переносной пульт управления; ПРК – панель релейная с контролем; БЗ – блок запуска; ПТ – панель тиристорная; ИП – источник питания; БРГ – блок разгрузки гидроблока; ЭМ – электромагниты.
Аппаратура дистанционного управления JNA проходческого комбайна фирмы «Джой» 12СМ15 осуществляет управление всеми электрическими и гидравлическими функциями комбайна.
В состав аппаратуры дистанционного управления JNA входит пульт управления, аккумулятор, который соединяется кабелем с ПДУ.
Аппаратура JNA может работать либо с помощью радиосвязи, либо с помощью соединительного кабеля. В случае использования соединительного кабеля ПДУ можно подсоединить к одной из двух предусмотренных точек. В цепи ПДУ имеется реле экстренного останова. На ПДУ имеются четыре светодиода. Они выполняют функции индикатора питания, статуса режима обучения и индикаторов скорости тяги.
Для обеспечения дополнительной гибкости и упрощения использования при различных условиях добычи в комбайне предусмотрены дополнительные функции:
- функция автоматического подъема (предотвращает случайное повреждение гидроподъемника стабилизатора из-за упора в подошву);
- функция блокировки передвижки (для предотвращения остановки двигателей тяги при изменении направления движения комбайна);
- функция увеличенной блокировки передвижки (дает оператору возможность отпускания кнопки «Обе вперед» или «Обе назад» без останова тяговых двигателей);
- функция связи режущих органов с конвейером (не допускает пуска двигателей РО с ПДУ до тех пор, пока оператор не включит двигатели конвейера на движение вперед);
- функция подачи воды при работе РО (обеспечивает автоматическое открывание водяного клапана комбайна по сигналу с ПДУ при инициировании программы пуска двигателя режущих органов).
Для автоматического контроля над поступлением воздуха в тупиковые выработки, проветриваемые вентилятором местного проветривания, применяется аппаратура контроля поступления воздуха в тупиковые выработки АПТВ.
Аппаратура АПТВ обеспечивает:
1) непрерывный контроль скорости воздуха, поступающего к забою;
2) автоматизированное, местное и диспетчерское управление через систему телемеханики рабочих или резервных вентиляторов местного проветривания;
3) автоматическое включение резервного ВМП при отключении рабочего ВМП;
4) автоматическое отключение группового аппарата с рекомендуемой выдержкой времени от 30 до 120 секунд с момента выдачи сигнала о нарушении нормального режима проветривания в выработке;
5) местную, световую индикацию о включенном или отключенном состоянии рабочего или резервного ВМП, о нормальном или аварийном режимах проветривания и включении группового аппарата;
6) самоконтроль основных элементов схемы, а так же защиту от замыкания, от обрыва цепи;
7) плавное заполнение вентиляционного трубопровода воздухом путем импульсного включения рабочего или резервного ВМП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.