· предварительно рассчитанное запаздывание реализации стратегии (временные затраты летчика на осмысление информации выработку стратегии и ручные операции по ее реализации), составляющие которой передаются на исполнение в блоки СИМ ДБВ1х1 «Атаман», АММ, САП.
Выходная информация блока:
· тип траектории (подается с соответствующей задержкой на блок «Атаман»);
· дальность пуска ракеты (подается с соответствующей задержкой на блок «АММ»);
· моменты применения, число циклов помех (подается с соответствующей задержкой на блок «САП)».
1. Самолет как исполнительное устройство (модель «АТАМАН»);
2. Ракета в воздухе (АММ);
3. Ракета на носителе (имитируется факт наличия ракеты на борту носителя. Координаты ракеты и вектор ее скорости до момента ее пуска включительно совпадают с координатами и вектором скорости носителя);
4. Станция активных помех (САП);
Модель самолета-истребителя [2] (И1 - носителя БОСЭС и И2) содержит блоки
расчета начального состояния, силовой установки, расчета высотно-скоростных
параметров, траекторного движения самолета, управления тягой двигателя,
автопилота, контура пилотирования и базы данных по самолету. Математическая
модель самолета представлена модулем автоматизации траекторного маневрирования
«АТАМАН», который позволяет смоделировать перемещение самолёта в пространстве за
интервал времени ![]() по
заданному фрагменту траектории. При использовании ММ для имитации движения
самолета И1 и самолета противника соответствующие параметры запрашиваются из
«Блока характеристик самолета И1» и «Блока характеристик самолетов противника».
Структурная схема математической модели АТАМАН представлена на рис. 8.
по
заданному фрагменту траектории. При использовании ММ для имитации движения
самолета И1 и самолета противника соответствующие параметры запрашиваются из
«Блока характеристик самолета И1» и «Блока характеристик самолетов противника».
Структурная схема математической модели АТАМАН представлена на рис. 8.
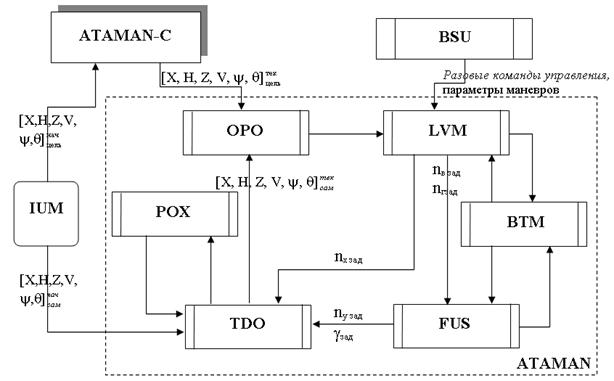
Рис.8. Математическая модель самолета «Атаман», используемая в базе знаний БОСЭС ДБВ1х1
1. ATAMAN – модуль автоматизации траекторного маневрирования (используемый для одного самолёта).
2. ATAMAN-С – модуль автоматизации траекторного маневрирования самолёта-цели (имеет такую же структуру как и ATAMAN). Эти модули работают параллельно и передают друг другу координаты самолётов (передача координат возможна через блок BSU).
3. TDO (²Траекторное Движение Объекта²) - включает уравнения полета самолета.
4. BDLA (²Параметры, Ограничения, Характеристики²) - представляет данные по самолету-истребителю или ударному самолету, его возможности и ограничения по ЛТХ.
5. OPO (²Относительное Положение Объектов²) - вычисляет координаты относительного положения цели.
6. LVM (²Логика Выбора Маневров²) - формирует текущий фрагмент траектории назначенного маневра.
7. BTM (²База Тактических Маневров²) - формируются траектории множества тактических маневров в горизонтальной и вертикальной плоскостях, реализуемых моделью АТАМАN.
8. FUS (²Формирование Управляющих Сигналов²) - рассчитывает сигналы управления самолетом по заданной перегрузке и заданному углу крена, обеспечивающие выполнение выбранного маневра.
9. IUM (²Исходные Условия Моделирования²) - задает начальные (исходные) параметры полета и признаки для моделей АТАМАN и АТАМАN-С.
10. BSU (²Блок Ситуационного Управления²) - вырабатывает разовые команды и параметры заданного фрагмента траектории.
11. АТАМАN-С - модель взаимодействующего объекта (цели).
Параметры модели АТАМАН: данные по самолету, его возможности и ограничения по летно-тактическим характеристикам.
Параметры поступают из базы данных своего самолета и самолетов противника.
Режимы работы модуля «АТАМАН»:
1) по типу самолёта:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.