
Кафедра РНПиС
Контрольная работа
Выполнил:
Студент заочного отделения
Судоводительского факультета
Кривошеев Е.Л.
Проверил:
Преподаватель
Зимин Н.С.
г. Санкт – Петербург
2004 г.
1. Какими техническими мерами можно увеличить дальность ради-олокационного обнаружения объекта?
Дальность действия РЛС определяется максимальным расстоянием между радиолокатором и объектом.
Обнаружение – просесс принятия решения о наличии или отсутствии радиолокационных сигналов в условиях помех.
Выделение полезных сигналов из помех, принятие решения о наличии или отсутствии цели в наблюдаемой области и определение координат называется первичной обработкой радиолокациооных сигналов.
Дальность действия РЛС определяется мощностью принимаемых отражен-ных сигналов на входе приемника, которая должна быть не мельше пороговой мощности – чувствительности приемника. Кроме того, дальность действия зави-сит от мощности передатчика, направленности антенны, эффективной поверхнос-ти отражения объекта (ЭПО), состояния атмосферы и т.п.
Максимальная дальность действия РЛС зависит от импульсной мощности передатчика зависит от импульсной чувствительности приемника, направленности антенны, ЭПО объекта, длинны волны. Среди вышеперечисленных факторов на дальность действия РЛС больше всего влияет направленность антенны. Для увеличения дальности следует: увеличить импульсную мощьность передатчика или повысить чувствительность приемника, повысить коэффициент направлен-ности антенны или увеличить длину волны.
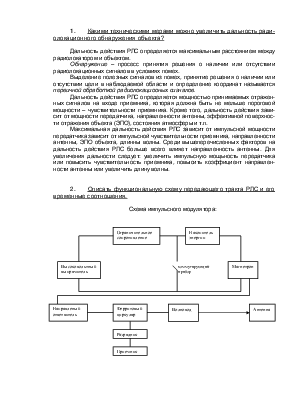
2. Описать функциональную схему передающего тракта РЛС и его временные соотношения.
Схема импульсного модулятора:
 |
коммутирующий
прибор
 |

 |
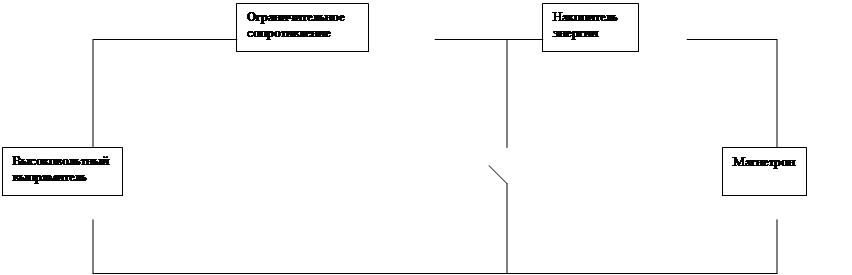
3. Чем обусловлена необходимость задержки в подаче высокого напряжения на магнетрон относительно момента включения РЛС? Как проверяется работа магнетрона?
Магнетрон – электровакуумный двухэлектродный прибор с электромагнит-ным управлением. При наличии магнитного поля электроны движутся по искрив-ленной траектории. Когда напряженность магнитного поля достигает некоторого значения, называемого критическим, электроны будут возвращаться сразу или че-рез несколько оборотов обратно на катод, не касаясь анода. В результате, враща-ющиеся электроны образуют пространственный заряд, имеющий характер элек-тронного ротора, который вращается вокруг катода. При своем вращении элек-тронный ротор возбуждает в контуре СВЧ колебания, частота которых определя-ется параметрами контура.
В диапазоне сантиметровых и миллиметровых волн на практике применя-ются многорезонаторные магнетроны. При включении питания в резонаторах воз-никают электромагнитные колебания, частота которых зависит от размеров резо-наторов. Проникая в пространство взаимодействия, это электронное поле тормо-зит или ускоряет движение электронов. При торможении электроны отдают свою энергию полю, при ускорении энергия отбирается от поля.
Если количество энергии, передаваемое электронами полю резонаторов, будет превышать количество энергии, отбираемой от поля, то создается условия баланса амплитуд, т.е. условия, необходимые для поддержания колебаний в маг-нетроне. Поскольку объемные резонаторы магнетрона связаны между собой, то энергия выводится во внешнюю нагрузку от одного из них.
Магнитное поле магнетрона создается специальными постоянными магни-тами.
В судовых навигационных РЛС применяются обычно так называемые паке-тированые магнетроны, у которых магнитная система является составной частью конструкции самого магнетрона. Этим уменьшается воздушный зазор между полюсами магнитов, а следовательно, и сопротивление магнитопровода, что позволяет сократить размеры и массу магнитной системы.
Катод магнетрона питается переменным током от специального понижаю-щего трансформатора накала, обладающего минимальной собственной емкостью. Это обеспечивает большую крутизну фронта радиоимпульса, даваемого магнетроном.
4. Как компенсируется внефазная составляющая поля вторичных излучателей в судовых радиопеленгаторах?
Для уменьшения антенного эффекта тщательно экранируют высокочастот-ные элементы приемника, соеддинительные провода и обмотку самой рамки, для чего обмотку рамки помещают в металлическую трубу, из материала с хорошей проводимостью. Труба должна иметь разрез, иначе из-за полной экранировки прием сигналов был бы невозможным. Другая мера уменьшения антенного эф-фекта – применение симметричных схем соединения рамки с приемником. Это достигается соединением с корпусом судна (заземлением) средней тоски обмотки рамки.
Одновременно с мерами, уменьшающими антенный эффект, применяется компенсация остаточного напряжения антенного эффекта. Принцип конпенсации заключается в том, что на вход прииемника подается дополнительное напряжение из вспомогательной ненаправоенной антенны, равное по амплитуде, но противо-положное по фазе напряжению антенного эффекта. Компенсации подвергается внефазная составляющая напряжения. Обусловлено это тем, что критерий правильного подбора компенсирующего напряжения – острое, вполне четкое уменьшение слышимости сигналов в положении рамки на минимуме.
5. С какой точностью необходимо производить импульсные изме-рения в ИФРНС, чтобы успешно разрешить многозначность фазовых отсче-тов?
Импульсная система первого поколения “Loran A” была разработана в 1942 году в США и использовалась для обеспечения навигации на удалениях порядка 600 – 700 миль от береговых станций при точности 0,5 – 1,5 мили. ФИРНС второго поколения – “Loran C” появилась в конце 50х годов и используется в районе побе-режья США.
Достоинство импульсной РНС – отсутствие многозначности измерений, а так же возможность селекции поверхностных и пространственных сигналов в точ-ке приема.
Стандартная цепь РНС “Loran C” состоит из ведущей станции (Master) и до 4х веждомых (Slave), излучение которых синхронизировано. Все береговые стан-ции излучают радиоимпульсы специальной формы на одной несущей частоте 100 кГц.
Дальность действия системы составляет до 1200 миль при работе на поверхностных сигналах при точности определения РНП с использованием ПИ с реализацией фазовых метедов 0,1 – 0,3 мкс. Точность определения 90 – 150 м.
Использование пространственных сигналов увеличивает дальность дейст-вия системы в 2 раза с одновременным ухудшением точности определения места до 1,5 – 3 миль.
6. Каково значение коэффицикнта сопряжения дорожек в системе «Декка» по красному, зеленому и фиолетовому семействам?
В режиме точных фазовых измерений, определяющим формирование точной сетки гипербол, каждая станция цепочки РНС «Декка» - ведущая, красная, зеленая, фиолетовая излучает одно гармоническое колебание частоты: 6f, 8f, 9f и 5f соответственно, где: 6, 8, 9 и 5 – коэффициент сопряжения дорожек.
7. Какие основные преимущества СНС перед РНС наземного бази-рования навигационных ориентиров?
Сущность прогресса в развитии радионавигации, вызванного использовани-ем ИСЗ, выражается в принципиальной возможности достижения более высоких эксплуатационных и технических характеристик систем. Из них можно выделить две главные: глобальность навигационного обеспечения мореплавания; достаточ-но высокая точность навигационных определений независимо от географического района плавания судов и гидрометеорогических условий.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.