Опустив из точки К0 перпендикуляр на линию Кr, получим позицию M '3, соответствующую кратчайшему расстоянию между кораблями.
4. Определение момента, когда пеленг изменяется на заданную величину q.
Для решения этой задачи нужно отложить от начального пеленга заданный угол q и провести прямую до пересечения с линией Кr. В точке пересечения М '4 и будет находиться позиция, пеленг из которой на объект маневра равен (П0 + q).
5. Определение дистанции и времени, когда один из кораблей пересечет курс другого.
Проведя из точки К0 линии курсов Км и Кк до пересечения с линией Кr, найдем позицию М '5, в которой корабль М пересечет курс корабля К на расстоянии К0М '5 и позицию М '8, в которой корабль К пересечет курс корабля М по корме на расстоянии К0М '8.
6. Расчет позиции маневрирующего корабля, в которой он будет находиться на заданном курсовом угле qкз относительно объекта маневра.
Отложив от вектора скорости объекта маневра заданный курсовой угол qкз, проведем линию до пересечения с линией относительного курса Кr и получим позицию М '6, соответствующую поставленному условию.
7. Расчет позиции, в которой курсовой угол на объект маневра равен заданной величине qмз.
Через позицию К0 проведем прямую под углом Км + qм ± 180° к меридиану. В пересечении этой линии с относительным курсом Кr находим позицию М '7, соответствующую заданному условию. Время маневра для любой из перечисленных задач легко определить, разделив соответствующий отрезок перемещения Sr на относительную скорость, то есть t = Sr / Vr.
Чтобы определить взаимное положение кораблей через заданный промежуток времени, необходимо рассчитать относительное перемещение корабля за это время Sr = Vrt нанести относительную позицию и снять необходимые элементы позиции.
Предвычисление взаимного положения можно производить с помощью элементов маневрирования, пользуясь формулами (4.21).
4.7.1 Общие положения
Целью называют любой корабль или объект, обнаруженный в море визуально или с помощью технических средств.
Для правильной оценки обстановки и принятия решения на применение оружия, уклонение от противника или расхождение необходимо знать кроме координат обнаруженной цели ее курс и скорость.
Для определения элементов движения цели (ЭДЦ) необходимо знать минимум четыре параметра, являющиеся функцией координат и вектора скорости цели. Такими параметрами могут быть два пеленга и две дистанции, четыре пеленга и т. п., взятые при определенных условиях.
На кораблях курс и скорость цели можно автоматически определить с помощью специальных приборов или графическим способом вручную. Наиболее распространенным, дающим достаточно надежные результаты является графический способ определения ЭДЦ по пеленгам и дистанциям.
4.7.2 Определение ЭДЦ на навигационной карте
Способ заключается в нанесении на карту мест цели, по которым находят ее курс и скорость. На карте на момент измерения пеленга на цель и дистанции до нее записывается время и наносится счислимое место своего корабля К0 (рис. 4.6). Из счислимого места по пеленгу обнаружения П0 и дистанции D0 наносится место цели (точка М0).
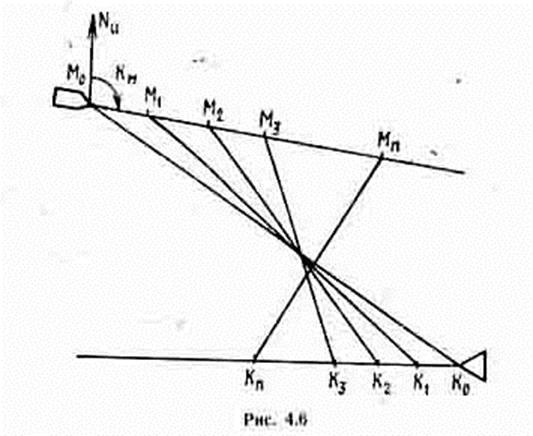
Очередные измерения пеленга и дистанции позволяют определить последующие места цели М1, М2, М3 и т.д. на момент времени T1, Т2, Т3 и т. д. Соединив точки М0, М1, М2 ..., Мn, получим прямую М0Мn, которая представляет собой перемещение Sм цели за время наблюдений t = Тn - Т0. Направление этой линии относительно северной части линии истинного меридиана есть курс цели. Скорость цели определяется по формуле Vм = Sм / t.
К достоинствам такого способа определения можно отнести наглядность перемещения кораблей относительно друг друга и относительно навигационной обстановки, возможность оценки изменения тактических условий в результате выполнения маневра относительно цели, к недостаткам-трудоемкость.
4.7.3 Определение ЭДЦ на маневренном планшете
Сущность способа заключается в нанесении на планшет относительных позиций по измеренным пеленгам на цель и дистанциям до нее и в последовательном решении треугольников позиций и скоростей.
На маневренном планшете задачу удобнее решать, принимая неподвижным в центре планшета свой корабль. В данном случае он является объектом маневра и обозначается К.
Для построения треугольника позиций по измеренным пеленгам П0, П1, ..., Пn и дистанциям D0, D1 , ..., Dn (рис. 4.7) наносятся относительные позиции маневрирующего корабля (цели) М0, М '1, …, М 'n и соединяются прямой линией. Вектор M0M 'n представляет собой вектор относительного перемещения цели Sr.
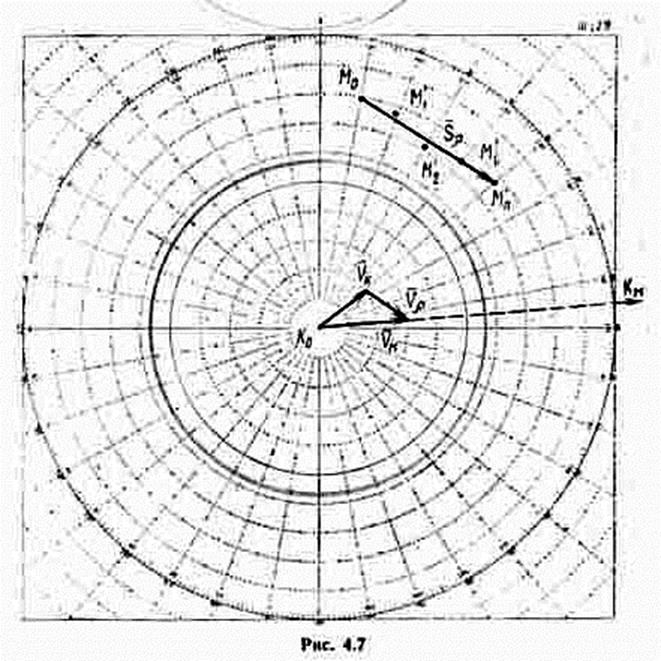
Для определения курса и скорости цели при точке К0 строится треугольник скоростей. По курсу объекта маневра (своего корабля) Кк откладывается вектор скорости Vк и из его конца параллельно вектору Sr и в том же направлении проводится вектор Vr, величина которого определяется по формуле
Vr = Sr / t,
где t - промежуток времени между первым и последним замерами.
Направление вектора Vм, соединяющего центр планшета с концом вектора Vr, снимается с внешней шкалы маневренного планшета и является искомым курсом цели Км. Скорость цели определяется по длине вектора Vм (с учетом масштаба построений треугольника скоростей).
Точность курса и скорости цели, определяемых графически по двум или более замерам пеленгов и дистанций, зависит от точности измерения пеленгов и дистанций и точности графических построений.
Ошибки измерений зависят от технических характеристик средства, с помощью которого производятся измерения, а также от практических навыков оператора. Точность измерения пеленгов и дистанций каждым техническим средством рассчитывают для каждого оператора по результатам тренировок.
Ошибки графики зависят от масштаба карты (маневренного планшета) и точности графических построений.
При расчете ЭДЦ графическим способом на маневренном планшете эти ошибки, как показывают практические исследования, находятся в пределах: mП. граф = 0,1° ÷ 0,3°; mD граф = 0,2÷ 0,4 каб.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.