H = [1 1 1; 1 1 1; 1 1 1]/9,
H = [1 1 1; 1 2 1; 1 1 1]/10, H = [1 2 1; 2 4 2; 1 2 1]/16.
Побочным эффектом всех
описанных выше линейных фильтров является то, что в результате усреднения на
профильтрованном изображении ![]() часто
пропадают мелкие детали, а контуры объектов становятся размытыми и нечеткими.
Для преодоления этого недостатка были разработаны более совершенные методы
подавления шумов, среди которых можно выделить винеровский и медианный фильтры.
часто
пропадают мелкие детали, а контуры объектов становятся размытыми и нечеткими.
Для преодоления этого недостатка были разработаны более совершенные методы
подавления шумов, среди которых можно выделить винеровский и медианный фильтры.
Если наблюдаемое
изображение повреждено аддитивным гауссовским шумом с нулевым средним и
дисперсией ![]() , то метод подавления шума
на основе адаптивного фильтра Винера обеспечивает меньшую
размытость контуров и мелких деталей по сравнению с описанными ранее методами.
В соответствии с этим методом яркости точек профильтрованного изображения
, то метод подавления шума
на основе адаптивного фильтра Винера обеспечивает меньшую
размытость контуров и мелких деталей по сравнению с описанными ранее методами.
В соответствии с этим методом яркости точек профильтрованного изображения ![]() вычисляются на основе локальных
оценок среднего значения
вычисляются на основе локальных
оценок среднего значения ![]() и
дисперсии яркости
и
дисперсии яркости ![]() наблюдаемого
изображения
наблюдаемого
изображения
 , (6)
, (6)
где
 ;
;  ; K и L – размеры
анализируемого участка изображения по вертикали и горизонтали соответственно.
; K и L – размеры
анализируемого участка изображения по вертикали и горизонтали соответственно.
В MATLAB Image Processing Toolbox подавление шума с помощью фильтра Винера осуществляется функцией wiener2, интерфейс которой имеет вид
J = wiener2(I,[m n],noise),
где
J – профильтрованное изображение; I – наблюдаемое изображение; [mn] – размеры анализируемого участка изображения в пикселях
по вертикали и горизонтали соответственно (по умолчанию – [3 3]);noise – мощность аддитивного шума (произведение дисперсии ![]() на количество точек изображения).
на количество точек изображения).
С помощью функций системы MATLAB мощность шума может быть вычислена как
noise = variance*prod(size(I)),
где
variance – дисперсия шума ![]() ;
prod(…) – функция, вычисляющая произведение элементов вектора; size(…) – функция, вычисляющая размерность многомерного массива
(если массив имеет размерность k1×k2×…×kn, то результат имеет вид вектора [k1 k2 … kn]).
;
prod(…) – функция, вычисляющая произведение элементов вектора; size(…) – функция, вычисляющая размерность многомерного массива
(если массив имеет размерность k1×k2×…×kn, то результат имеет вид вектора [k1 k2 … kn]).
При вызове функции wiener2 параметр noise
является необязательным. Если он не указан, то в качестве оценки дисперсии шума
используется среднее значение всех локальных оценок ![]() .
.
Наиболее эффективным методом подавления импульсного шума (шума типа “соль и перец”) является медианная фильтрация. Это нелинейный метод обработки изображений, основанный на замене каждого элемента наблюдаемого изображения медианой всех элементов, попавших внутрь скользящего окна размером K×L, центр которого последовательно помещается в каждую точку изображения. (Медианой дискретной последовательности а1, а2, …, аN для нечетного N называется тот элемент последовательности, для которого существует (N–1)/2 элементов, не превышающих его по величине, и (N–1)/2 элементов, больше или равных ему по величине.) Медианный фильтр подавляет импульсные сигналы, длительность которых составляет менее половины ширины окна и вызывает уплощение вершины треугольных сигналов. Как правило, фильтр сохраняет контуры изображения, но иногда может искажать форму объектов. В частности, он скругляет острые (меньше 90º) углы ярких объектов на изображении.
Медианная фильтрация изображений в MATLAB Image Processing Toolbox реализована в виде функции medfilt2, которая может быть вызвана следующим образом:
J = medfilt2(I,[m n]),
где J – профильтрованное изображение; I – наблюдаемое изображение; [mn] – размеры скользящего окна в пикселях (по умолчанию – [3 3]).
2.2. Реставрация изображений
Реставрацией
называют процесс компенсации искажений наблюдаемого изображения ![]() с целью получения оценки
с целью получения оценки ![]() некоего идеального изображения
некоего идеального изображения ![]() , которое наблюдалось бы на выходе
идеального датчика, не вносящего никаких искажений. Искажения могут вноситься
турбулентностью атмосферы, расфокусировкой оптики, недостаточным временем
экспозиции, смещением датчика в процессе формирования изображения (размытость
контуров наблюдаемых объектов) и т.п. Очевидно, что эффективность реставрации
зависит от адекватности используемых моделей пространственных искажений. В
литературе, посвященной цифровой обработке изображений, описание
рассматриваемых ниже методов реставрации приводится для непрерывных изображений
, которое наблюдалось бы на выходе
идеального датчика, не вносящего никаких искажений. Искажения могут вноситься
турбулентностью атмосферы, расфокусировкой оптики, недостаточным временем
экспозиции, смещением датчика в процессе формирования изображения (размытость
контуров наблюдаемых объектов) и т.п. Очевидно, что эффективность реставрации
зависит от адекватности используемых моделей пространственных искажений. В
литературе, посвященной цифровой обработке изображений, описание
рассматриваемых ниже методов реставрации приводится для непрерывных изображений
![]() и
и ![]() ,
хотя в действительности наблюдаемое изображение и получаемая оценка идеального
изображения являются дискретными (
,
хотя в действительности наблюдаемое изображение и получаемая оценка идеального
изображения являются дискретными (![]() и
и ![]() соответственно).
соответственно).
Пусть
математическая модель искажений имеет вид двумерного линейного фильтра с
импульсной характеристикой ![]() . Тогда
частотная характеристика искажающего фильтра определяется как двумерное
преобразование Фурье его импульсной характеристики
. Тогда
частотная характеристика искажающего фильтра определяется как двумерное
преобразование Фурье его импульсной характеристики
 , (7)
, (7)
где ![]() .
.
Если идеальное
изображение рассматривается как реализация двумерного случайного процесса с
нулевым средним и известным энергетическим спектром ![]() ,
а к искаженному изображению добавляется аддитивный гауссовский шум с нулевым
средним и известным энергетическим спектром
,
а к искаженному изображению добавляется аддитивный гауссовский шум с нулевым
средним и известным энергетическим спектром ![]() ,
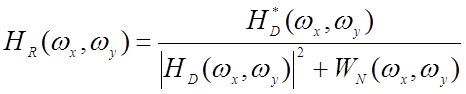
то минимальная среднеквадратическая ошибка реставрации достигается
использованием винеровского фильтра, частотная характеристика которого имеет
вид
,
то минимальная среднеквадратическая ошибка реставрации достигается
использованием винеровского фильтра, частотная характеристика которого имеет
вид
 , (8)
, (8)
где * – знак комплексного сопряжения.
Оценка идеального изображения будет определяться как обратное двумерное преобразование Фурье произведения спектра наблюдаемого изображения и частотной характеристики реставрирующего фильтра, задаваемого выражением (8):
 . (9)
. (9)
Если идеальное
изображение не обладает пространственной корреляцией и его энергетический
спектр принимает единичное значение во всем диапазоне пространственных частот ![]() и
и ![]() ,
то выражение (8) приобретает более простой вид:
,
то выражение (8) приобретает более простой вид:
 .
(10)
.
(10)
При отсутствии аддитивного шума винеровский фильтр вырождается в так называемый инверсный фильтр, имеющий частотную характеристику
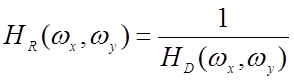 . (11)
. (11)
В MATLAB Image Processing Toolbox реставрация изображений с помощью винеровского фильтра реализована в виде функции deconvwnr, интерфейс которой имеет вид
![]() = deconvwnr(I, PSF, NCORR, ICORR),
= deconvwnr(I, PSF, NCORR, ICORR),
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.