|
|
|
|
Для «широкой» допустимой области:
![]() → min
→ min
1 ≤ X1 ≤ 5.2
5≤ X2 ≤ 9
1 ≤ U1 ≤ 5
2 ≤ U2 ≤ 5
Y1min + u[α/2=(1-p)/2]s{ Y1} ≤ Y1 (X1, X2, U1, U2)≤ Y1max – u[α/2=(1-p)/2]s{ Y1}
p = 0.9 – доверительная вероятность
u[α/2=(1-p)/2]– квантиль нормированного нормального распределения
α/2=(1-p)/2 => α/2=0.05
u[α/2=(1-p)/2]=1.64
Решение: Y2 = 2.956 при (X1, X2, U1, U2)=( 1 , 5 , 1 , 2 )
Для «узкой» допустимой области:
![]() → min
→ min
1 ≤ X1 ≤ 5.2
5≤ X2 ≤ 9
1 ≤ U1 ≤ 5
2 ≤ U2 ≤ 5
Y1min + u[α/2=(1-p)/2]s{ Y1} ≤ Y1(X1, X2, U1, U2)≤ Y1max – u[α/2=(1-p)/2]s{ Y1}
p = 0.9 – доверительная вероятность
u[α/2=(1-p)/2]– квантиль нормированного нормального распределения
α/2=(1-p)/2 => α/2=0.05
u[α/2=(1-p)/2]=1.64
Решение: Y2 = 7.264 при (X1, X2, U1, U2)=( 4.101 , 5 , 5 , 2 )
Т.о. выполняется неравенство:
Y2=2.956 ≤ Y2=6.474 ≤ Y2=7.264
3. Испытание статистических гипотез в задаче стохастической оптимизации
План задачи: 
Критерий оптимизации:
|
Ограничения на управляемые переменные:
1 ≤ X1 ≤ 5.2
5≤ X2 ≤ 9
1 ≤ U1 ≤ 5
2 ≤ U2 ≤ 5
Функциональные ограничения:
 £Y1max
£Y1max
 ³Y1min
³Y1min
![]()
![]() -- дисперсия Y1 и Y2
соответственно
-- дисперсия Y1 и Y2
соответственно
V1, V2 – ковариационная матрица коэффициентов
Решение: Y2 = 2.816 при (X1, X2, U1, U2)=( 1 , 5.2 , 1 , 5 )
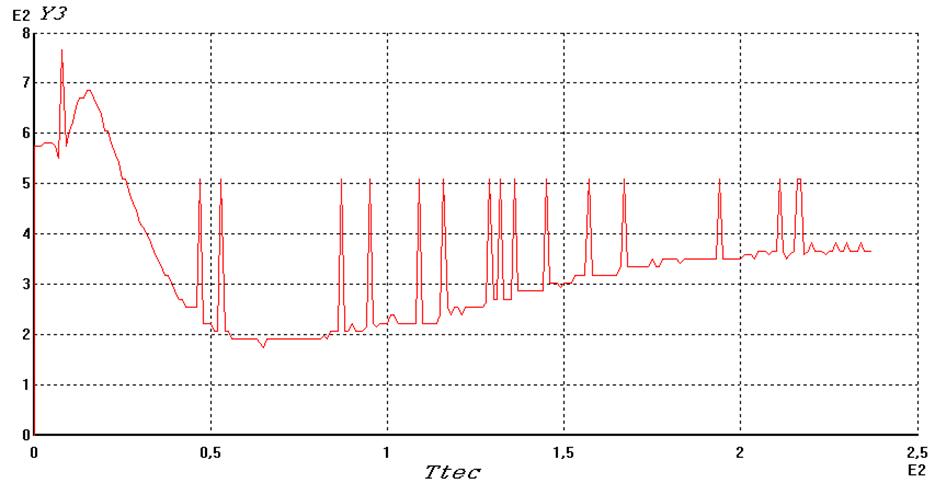
Исследование динамических свойств выходного параметра y3 (канал y3-u2).
Для идентификации динамических характеристик объектов управления используются специальные входные сигналы: ступенчатые, импульсные, синусоидальные. Ступенчатый сигнал является наиболее простым для применения, поэтому мы и использовали его в нашей работе. Здесь мы сняли кривую разгона и по ней графо-аналитическим методом определили параметры динамического звена (передаточную функцию звена). Однако этот метод используется в основном только в лабораторных исследованиях, так как на реальном объекте его применение ведет к увеличению себестоимости производства, а зачастую и к выходу за предельные границы допустимых ограничений, то есть к остановам производства и авариям.
Для снятия был взят период опроса (время дискретизации), равный 1 секунде, выбор сделан из условия непрерывности процесса.
Разгонная характеристика.(scachok1.i4)
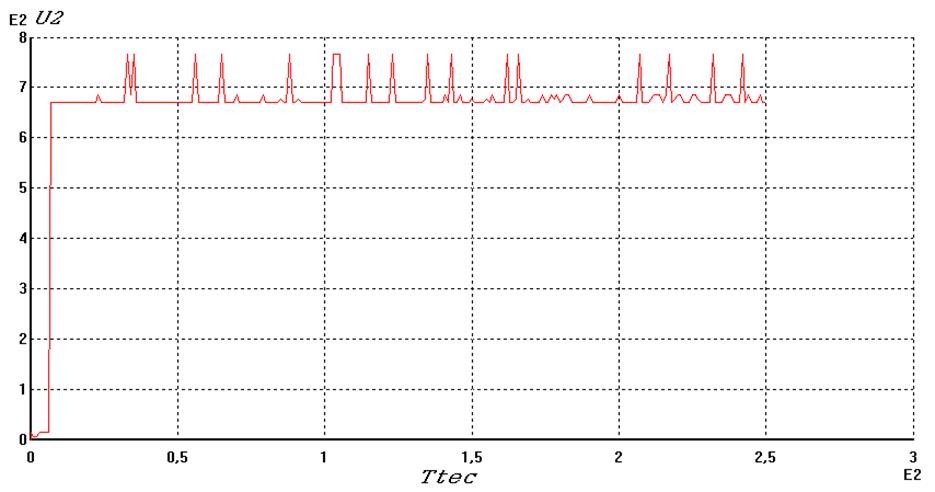
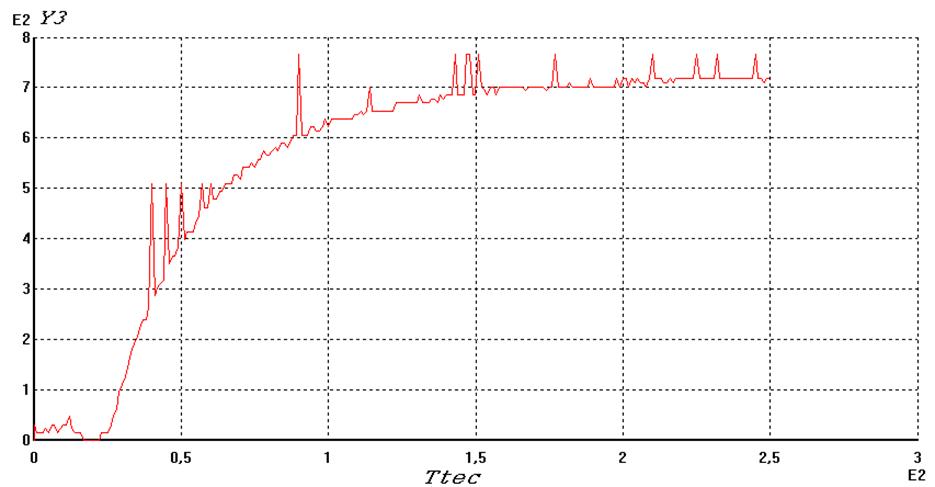
Вид передаточной функции: 
U2 = 6.72
Y3 = 7.2
коэффициент передачи K0 = 1.07
Исследование и выбор оптимального закона регулирования регулятора
1. Выбор внешних показателей качества процесса.
Были выбраны Для П-регулятора и ПИ-регулятора был выбран переходный процесс с 20% перерегулированием.
2. Нахождение оптимальных параметров настроек регуляторов различными законами для регулирования переходного процесса с выбранными свойствами.
П-регулятор:
с 20% перерегулированием – Кр = 1,8
ПИ-регулятор:
с 20% перерегулированием – Кр = 0,39 , Ти = 30,26
3. Полученные по итогам эксперимента результаты.
П-регулятор с 20% перерегулированием: (Localavt.E4, Param.E4)

ПИ-регулятор с 20% перерегулированием: (Localavt.E1, Param.E1)
Предлагаемый комплекс технических средств
Структура программируемого контролера:
 |
 |
 |
 |
||||
![]()
![]()
|
 .... ..
.... ..
от аналог.датчиков от дискрет.датчиков
А ... А УСО
ФДВ
ПС-1 от конт.А
от контр. В
от аналог. датчиков
и ИМ
А- адаптер, предпроцессор
ФДВ-формирователь дискретных величин
АВ- аналоговые величины
ДВ-дискретные величины
СП-сетевой процессор
АЛТ-арифметико- логический процессор
Т-процессор времени
ПС-0 –шина магистрального интерфейса
УСО –устройство сопряжения с объектом
ЭНЗУ- энерго независимое запоминающее устройство .
ИА-испонительный автомат
ВАС-выносная аналоговая станция ,представляющая программное устройство ввода аналоговых сигналов и размещаемое непосредственно рядом с датчиками
МЛР- микропроцессорный локальный регулятор.
ПС-1- локальная сеть программируемого контролера.
Стадия 2. Технический проект.
Основной целью,которую преследует разработчик при выполнении данной стадии работ - это разработка основных технических решений по создаваемой системе и окончательное определение ее сметной стоимости. Содержание этих работ сводится к проведению общесистемного и аппаратурно-технического синтеза АСУ ТП и разработке для нее специального математического и информационного обеспечений и подразделяется на следующие этапы.
Этап 1. Системно-технический синтез АСУ ТП.
На данном этапе разрабатывается общесистемная документация, документация организационного обеспечения, документация информационного обеспечения в соответствии с существующими ГОСТ.
Этап 2. Аппаратурно-технический синтез АСУ ТП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.