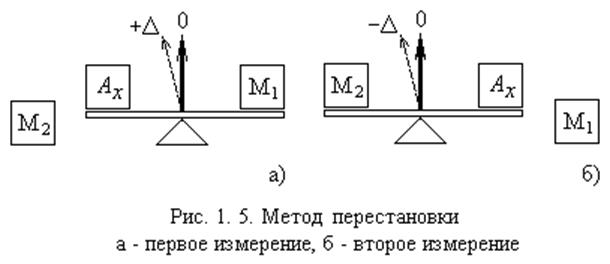
- метод перестановки: измеряемую и известную величины сравнивают (рис. 1.5) до и после их взаимной перестановки.
Например, добиваются совпадения стрелки весов с нулевой отметкой в обоих случаях. Результат определяется как среднее значение известной величины. Исключается систематическая погрешность D, которая возникает из-за возможного отклонения стрелки весов от нулевой отметки до проведения измерений:
AX = M1 = M + D, при Aизм.1 =0; AX = M2 = M - D, при Aизм.2 =0,
результат: AX = (M1 + M2)/2 = M;
 Если
величины мер регулируются дискретно с шагом DМ, то общая погрешность при двух измерениях за счёт
регулировки составит Dш£
2DМ. Погрешность,
вносимая весами незначительна, т. к.
от них требуется только
чувствительность, чтобы определить, равны ли
показания нулю или нет.
Если
величины мер регулируются дискретно с шагом DМ, то общая погрешность при двух измерениях за счёт
регулировки составит Dш£
2DМ. Погрешность,
вносимая весами незначительна, т. к.
от них требуется только
чувствительность, чтобы определить, равны ли
показания нулю или нет.
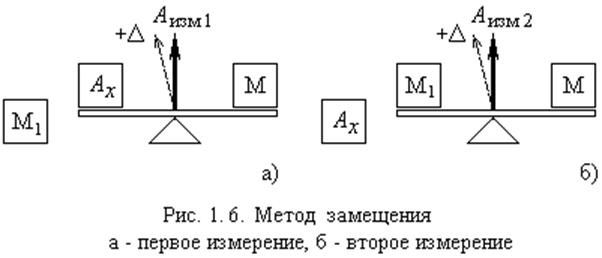
- метод замещения: (рис. 1.6) измеряемая величина замещается равновеликой ей известной величиной, воспроизводимой мерой.
Известная величина регулируется, и по ней определяют измеряемую величину.
Например, взвешивание с поочередным помещением измеряемой массы и гирь на одну и ту же чашку весов. О равенстве указанных величин судят по одинаковому отклонению стрелки весов:
Aизм.1 =AX + D; Aизм.2 = M1 + D, приAизм.1 = Aизм.2 ,
результат: AX = M1.
Погрешность за счёт регулировки меры равна Dш £ DМ, где DМ – шаг регулировки меры. Также добавляется погрешность, вносимая весами, например, за счёт калибровки (цены деления), но исключается систематическая погрешность, т. к.Aизм.1 = Aизм.2.
Стратегии измерений
 |
Если интервал между выборками обозначить nT+ a, где T – период измеряемого сигнала, то период восстановленного (по этим отсчётам) сигнала будет равен (nT+ a)T/a. Это означает уменьшение частоты в a/(nT+ a) раз.
Например, на экране стробоскопического осциллографа с полосой пропускания 20 кГц можно восстановить периодические электрические сигналы с частотой до 15 ГГц. Согласно теореме Котельникова, для достоверного восстановления формы сигнала необходимо провести не менее 10 выборок [ ].
Если полоса пропускания СИ значительно превосходит ширину спектра измеряемого сигнала, можно применить мультиплексирование [1, с. 43] – передачу нескольких сигналов по одной линии связи за счёт их временного или частотного разделения.
 |
в установке очистки нефти. Аналоговые входные сигналы поступают из различных точек очистной установки, где, скажем, измеряются температура, давление, расход нефти. Эти сигналы меняются столь медленно, что быстрая система измерений (переключатель SA1, АЦП) и управления (компьютер) может поочерёдно обрабатывать много сигналов и выдавать результат их обработки по не меньшему числу выходов (ЦАП, переключатель SA2). В каждый момент времени данная система обрабатывает один сигнал.
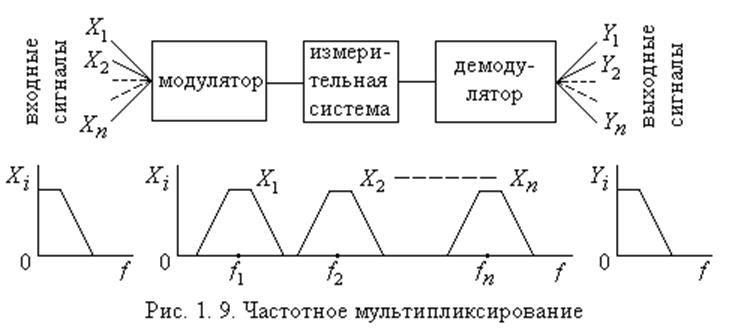 |
При этом спектры преобразуемых измеряемых сигналовX1… Xn занимают соседние интервалы частот f1… fn без перекрытия (рис. 1.9).
Например, если данная система измеряет напряжение, то [8, стр.57]:
![]() ,
(1.5)
,
(1.5)
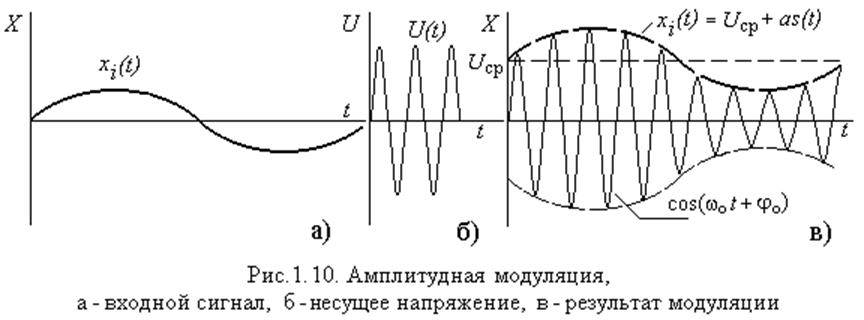
где UM(t) – модулирующий входной сигнал, медленно меняющийся по сравнению с несущей функцией U(t) = cos Y(t), изменяющейся с частотой ¦i .
Пусть в выражении (1.5) полная фаза Y(t) = w0t + j0, а амплитуда UM(t) изменяется по закону s(t) относительно некоторого среднего уровня UСР. Тогда:
![]() , (1.6)
, (1.6)
 |
Если ![]() , то
, то  ;
;  ,
,
где s(t) – гармоническое колебание (рис. 1.10, а) с частотой ![]() <<
<<![]() ,
начальной фазой
,
начальной фазой ![]() ;
; ![]() -
коэффициент модуляции (при М = 0, u(t) просто гармонический сигнал).
-
коэффициент модуляции (при М = 0, u(t) просто гармонический сигнал).
Демодулятор, используется для восстановления каждого сигнала в его исходной полосе частот Yi. Этот принцип часто используют в телеметрии (при передаче результатов измерений на расстояние) и в телефонии.
Для исключения неоднозначности передачи разнополярных сигналов к переменному сигналу Xi при модуляции добавляется постоянная составляющая UСР, которая в процессе демодуляции вычитается.
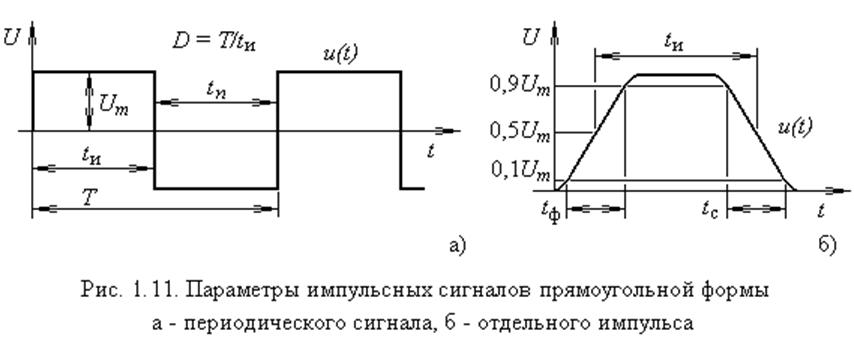
Параметры периодических сигналов
При проведении измерений и передаче информации часто используют импульсы прямоугольной формы (рис. 1.11), в связи с тем, что:
- многие производственные процессы имеют импульсный характер;
- передача информации импульсами, разделёнными паузами, снижает затрачиваемую мощность;
- позволяет разгрузить каналы связи, так как многие процессы изменяются медленно, и нет необходимости непрерывно передавать информацию о них;
- повышается помехозащищённость каналов связи.
 |
Электрические сигналы, например напряжение, характеризуются мгновенным, средним (для периодического сигнала постоянная составляющая U0), средневыпрямленным UСР.В, среднеквадратическим U (действующим, П.1.3) и пиковым (для периодических сигналов амплитудным)Um значениями.
Каждому закону изменения электрических сигналов (формы кривой мгновенных значений) соответствуют определённые количественные соотношения между их амплитудным, среднеквадратическим и средним значениями.
Эти отношения оцениваются коэффициентами – амплитуды: Kа = UM/U и формы: Kф = U/UСР.В, которые, для наиболее употребительных сигналов, приведены в таблице 1.4. (П.1.4). Они позволяют определить параметры периодических сигналов и возможные погрешности СИ, так как каждый прибор предназначен для измерения определённых значений электрических сигналов, что определяет его область применения и объясняет причину возникновения погрешностей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.