 ;
;  ;
;  .
(11)
.
(11)
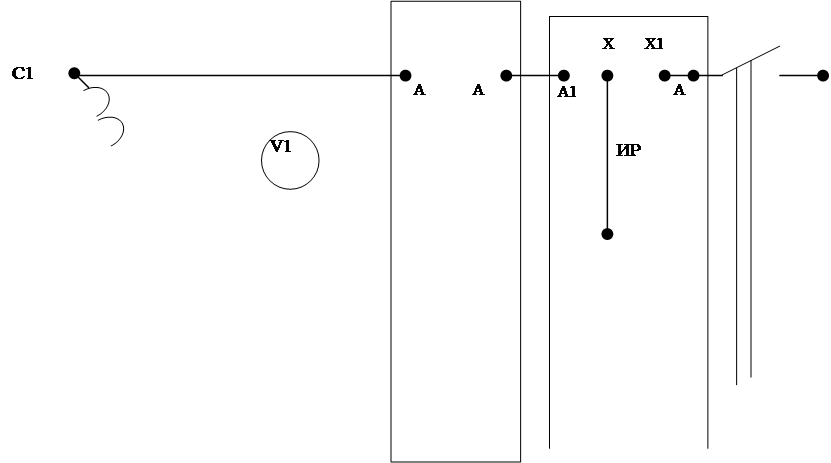
Сопротивление обратной последовательности Z2=R2+jX2 определяется по схеме (рисунок 8).
|
|||
 |
|||
![]()
![]()
|
|
|
|
|
|

|

![]()
![]()
|
|
![]()
![]()
 |
 |
Рисунок 8 – Схема для проведения опыта двухфазного короткого замыкания
Опыт проводится так же, как по схеме рис.3б. Результаты измерений заносятся в таблицу 6.
Таблица 6
|
P |
Q |
I |
UАВ |
If |
R2 |
X2 |
Z2 |
|
|
|
|
|
Вт |
ВАР |
А |
В |
А |
Ом |
Ом |
Ом |
о.е. |
о.е. |
о.е. |
|
|
1 |
|||||||||||
|
2 : |
Сопротивления вычисляются по формулам:
 ;
;  ;
;
 . (12)
. (12)
Результаты вычислений также заносятся в таблицу 6.
3.6 Определение сопротивлений прямой последовательности методом скольжения
Опыт проводится по схеме (рисунок 9). При этом обмотка якоря СМ запитывается от сети переменного тока через индукционный регулятор ИР. Частоту вращения приводного двигателя следует установить несколько выше или ниже синхронной. Для этого необходимо с помощью регулировочного реостата приводного двигателя Rрег добиться того, чтобы стрелки приборов испытывали заметные медленные колебания.
 |
|||
|
|||
![]()
![]()
![]()
![]()
![]()
![]()
|
|

|
|
|
|
|

![]()
 |
 |
||||||
|
![]()
![]()
|
|
|
|
|
![]()
|
 |
 |
||
![]()
![]()
![]()
|
Трехфазный ток, протекающий по обмотке статора, создает вращающееся магнитное поле. Вследствие различия частот вращения поля и ротора поле статора будет медленно вращаться относительно ротора.
В момент времени, когда ось потока статора будет совпадать с продольной осью СМ, магнитное сопротивление для потока будет наименьшим, и из сети будет потребляться наименьший ток (напряжение на обмотках будет наибольшим, так как падение напряжения на индукционном регуляторе DU будет наименьшим).
В момент времени, когда поле статора совпадает с поперечной осью СМ, будут наблюдаться обратные результаты, то есть магнитное сопротивление потоку будет наибольшим, будет наибольший ток статора и наименьшее напряжение.
При этом показания вольтметров, амперметров и ваттметров будут совершать медленные колебания с частотой скольжения.
Показания приборов записываются в таблицу 7.
Таблица 7
|
Uф min |
Uф max |
Iф max |
Iф min |
Pmax |
Pmin |
Rd |
Rq |
Zd |
Zq |
Xd |
Xq |
|
|
|
|
В |
В |
А |
А |
Вт |
Вт |
Ом |
Ом |
Ом |
Ом |
Ом |
Ом |
о.е. |
о.е. |
|
|
1 |
||||||||||||||
|
2 : |
Сопротивления рассчитываются по формулам:
![]()
 ;
;  ;
;
 ;
;  ; (13)
; (13)
 ;
;  .
.
3.7 Определение сопротивления обратной последовательности
непосредственным измерением
Опыт проводится по схеме, аналогичной рисунку 9, с той лишь разницей, что цепь индуктора замыкается на амперметр, поле статора вращается с синхронной частотой в направлении, противоположном вращению ротора.
Для этого необходимо поменять местами зажимы двух любых фаз индукционного регулятора ИР.
Напряжение от индукционного регулятора подается пониженное (»30% от Uном).
Сопротивления рассчитываются по формулам:
 ;
;  ;
;
 . (14)
. (14)
Результаты расчетов и опытные данные заносятся в таблицу 8.
Таблица 8
|
Uф |
Iф |
Pф |
R2 |
Z2 |
X2 |
|
|
|
|
|
В |
А |
Вт |
Ом |
Ом |
Ом |
о.е. |
о.е. |
о.е. |
|
|
1 |
|||||||||
|
2 : |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.