 Рис .2
Рис .2
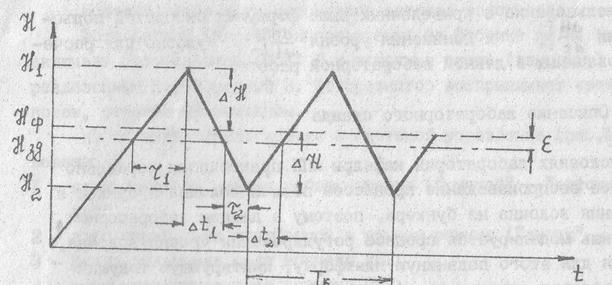
Как правило, место запаздывание в формировании регулирующего воздействия после возникновения того ил иного сигнала датчика. Действительно, при использовании, например, пневмотранспорта подача волокна не может ни начаться, ни прекратиться мгновенно, в момент изменения состояния датчика, вентиляторы имеют время разгона и время выбега. Запаздывания в прекращении подачи волокна τ1 и в начале подачи волокна τ2 показаны на рис.2.
Нетрудно в рассматриваемом случае получить формулы для определение характеристик автоколебательного режима.
Скорость подъема уровня
![]() определяется формулой (2), а скорость
понижения уровня
определяется формулой (2), а скорость
понижения уровня ![]() формулой (3). Тогда имеем:
формулой (3). Тогда имеем:
![]() ,
(4)
,
(4)
 ,
(5)
,
(5)
![]() ,
(6)
,
(6)
 ,
(7)
,
(7)
Отсюда нетрудно получить:
![]() ,
(8)
,
(8)
![]() ,
(9)
,
(9)
 .
(10)
.
(10)
Использование в
приведенных выше формулах скоростей подъема уровня ![]() и
понижения уровня
и
понижения уровня ![]() удобно для расчетов,
производимых в данной лабораторной работе.
удобно для расчетов,
производимых в данной лабораторной работе.
3. Описание лабораторного стенда
В условиях лаборатории кафедры АПП практически нереально буквальное воспроизведение процессов подачи волокна в бункер и потребление волокна из бункера, поэтому в данном лабораторном стенде лишь моделируется процесс регулирования уровня волокна, используя для этого для этого подвижную платформу, имитирующую текущий уровень волокна, перемещаемую вверх и вниз двигателем. При подъеме платформы предполагается подача и потребление волокна, а при опускании платформы – только потребление волокна, о чем сигнализируют соответствующее табло. От студентов требуется определенное воображение, позволяющее представить себе моделируемый стендом объект и протекающие в нем процессы.
Для более тесной привязки макета к моделируемому объекту предполагается по скорости подъема и опускании платформы оценить моделируемые интенсивности подачи и потребления волокна (Qпод и Qпотр). Предусмотрена возможность изменения этих скоростей, а также задание различного запаздывания в моделируемых подаче и прекращении подачи волокна (τ1 и τ2), для чего в схему стенда введены два реле времени.
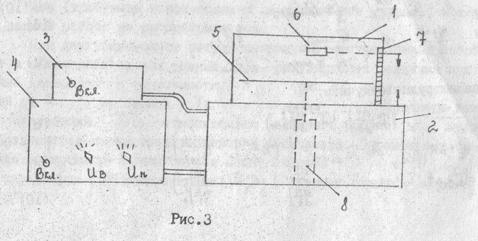
Лабораторный стенд (рис.3) состоит из макета бункера 1,кожуха 2 с системой управления и двух источников питания 3,4.
Внутри макета бункера размещены подвижная платформа 5, фотодатчик уровня 6 и шкала 7 положения платформы. Платформа перемещается двигателем постоянного тока 8, размещенным внутри кожуха 2.
Использование двух источников питания поясняется ниже. Фотодатчик (рис.4), используемый на фабрике им. Ногина, включает фоторезистор(ФСК) 1 и источник света (лампочку) 2, распределенные перегородкой 3. Фоторезистор воспринимает световой поток, отраженный волокном.
На лицевую панель кожуха с системой управления (рис.5) выведены:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.