Система двухпозиционного регулирования уровня
1. Цель работы
Целью данной работы являются исследования модели системы двухпозиционного автоматического регулирования уровня сыпучего материала, определение влияния параметров системы на процесс автоматического регулирования.
2. Указания к выполнению работы
В ряде технологических объектов текстильной промышленности возникает необходимость в стабилизации уровня сыпучих материалов. Так, например, необходимо поддерживать постоянный уровень хлопкового волокна в бункерах трепальных и чесальных машин, так как от постоянства уровня зависит ровнота материала (холста, ленты), получаемого на выходе машины.
Подача волокна в бункер часто осуществляется пневмотранспортом, а отбор (потребление) материала из бункера- рабочими органами машины.
Изменение потребление материла из бункера материала возмущающим воздействием , а изменение подачи – регулирующим воздействием.
Бункер, как объект регулирования уровня волокна, может быть описан уравнением
 ,
(1)
,
(1)
где
S – площадь поперечного сечения бункера,
H – уровень волокна,
T – время,
Qпод - интенсивность подачи воловна,
Qпотр – интенсивность потребления воловна.
В качестве датчика уровня в подобных системах широко применяеться фотоэлемент в комлексе с источником света, причем используеться либо эффект прекрытия светового луча материалом (источник света и фотоэлемент расположены на противоположных стенках бункера), либо эффект отражения луча материалом (источник света и фотоэлемент расположены рядом,на одной стенке бункера). В обоих случаях датчик формируеться позиционный сигнал («да»- «нет») и потому позволяет реализовать лишь позиционное(обычно двух-позиционное) регулирвание. В простейшем случае используеться всего один датчик, размещенный на заднем уровне материала.
Если фактически уровень ниже заданного , то обеспечивается подача материала в бункер с интенсивностью Qпод , непременно большей, чем максимально возможное Qпотр . При этом происходит повышение уровня материала со скоростью.
![]() ,
(2)
,
(2)
Если фактический уровень выше заданного, то подача материала отсутствует (Qпод =0) и происходит понижение уровня материала со скоростью
 ,
(3)
,
(3)
В этом случае реализуется зависимость регулирующего воздействия от регулируемой величины, показанная на рисунке 1 , где
Hзд - заданное значение уровня.
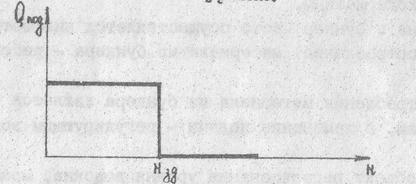
Рис .1
Эта зависимость характеризуется двухпозиционное регулирования без зоны возврата : регулирующее воздействие Qпод имеет два фиксированных значения, причем переход с одного значения на другое происходит скачком при одном и том же значении уровня как в прямом, так и обратном направлении (при подъеме и понижении уровня).
Возможны и другие варианты формирования регулирующего воздействия (требующие использования двух датчиков уровня), которые в данной работе не рассматриваются.
При двухпозиционном регулировании система неизбежно работает в автоколебательном режиме, т.е. регулируемая величина постоянно колеблется в окрестности Нзд (рис .2). Амплитуда колебаний ∆H , их период Тк и смещение ε среднего значения колебании Нср относительно заданного уровня Нзд будут определяться параметрами объекта и регулятора. Параметрами объекта в рассматриваемом случае можно считать S и Qпотр , а к параметрам регулятора кроме Qпод следует отнести имеющие,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.