7. АНАЛИЗ ДИНАМИКИ ЭП
Анализы динамики синтезированной нами системы автоматического управления электроприводом рольганга заключается в расчетах переходных процессов основных динамических показателей системы. Расчет переходных процессов произведем в программе Matlab в приложении Simulink.
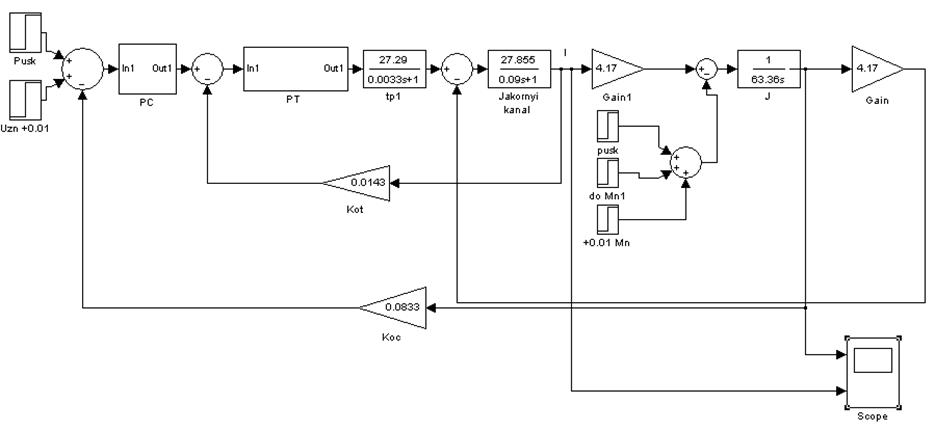
Рис.7.1. Фрагмент программы Matlab: структурная схема САУ электроприводом рольганга.
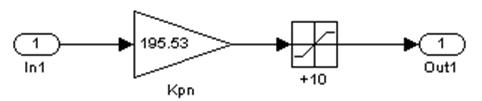
Рис.7.2. Фрагмент программы Matlab: регулятор скорости,
синтезированный на ТО, с ограничителем.
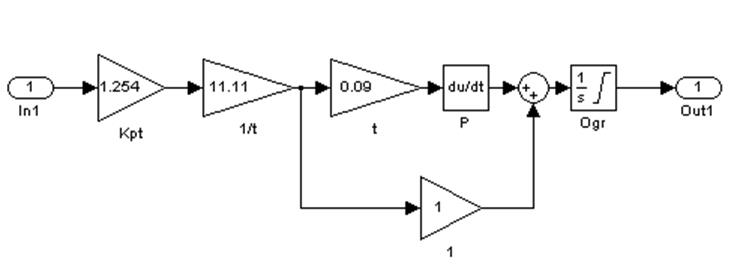
Рис.7.3. Фрагмент программы Matlab: регулятор тока, синтезированный на ТО,с ограничителем.
Переходные процессы, необходимые для оценки динамических показателей однозонной системы управления:
1. Пуск на холостом ходу, u ЗC =0,9∙UЗCН, MС = 0,1⋅MН
2. По моменту сопротивления, MС = MН
3. По моменту сопротивления “в малом”, MС = 0,01⋅MН
4. По управлению “в малом”, u ЗC =0,01∙UЗCН
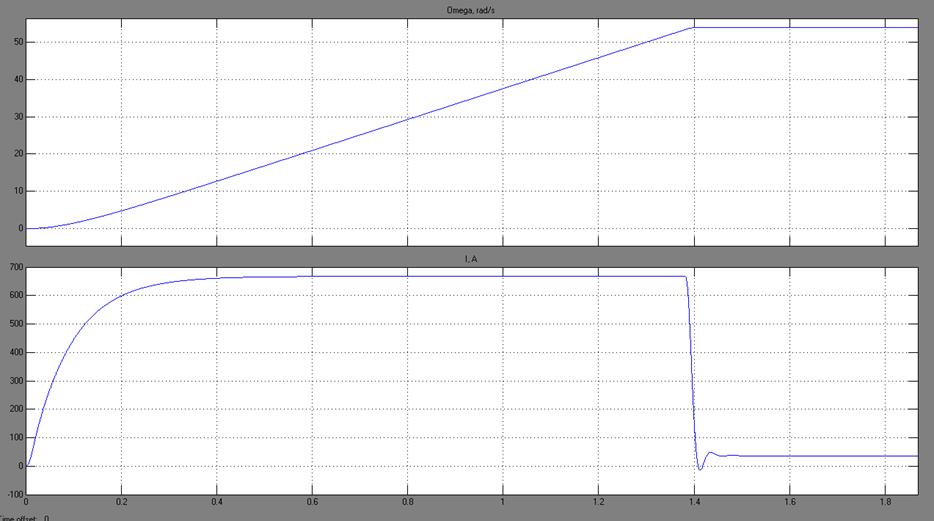
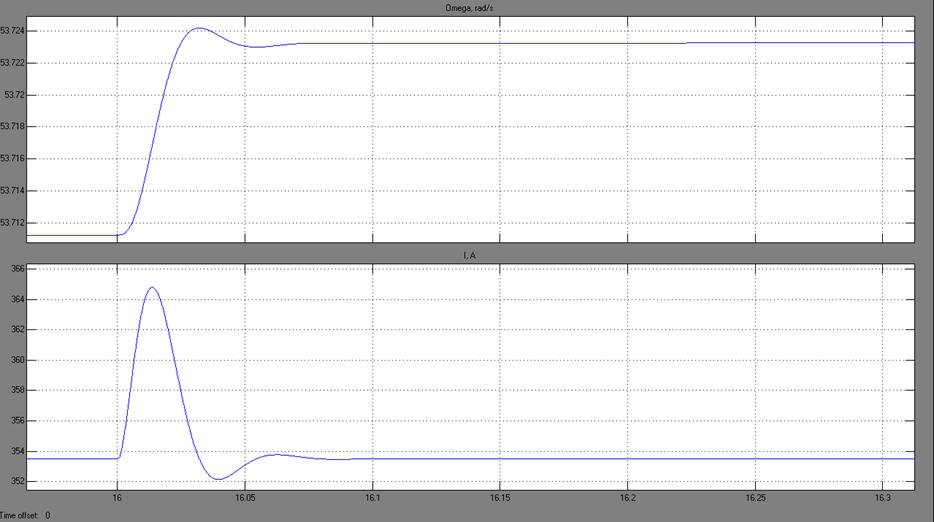
Общий вид переходного процесса:
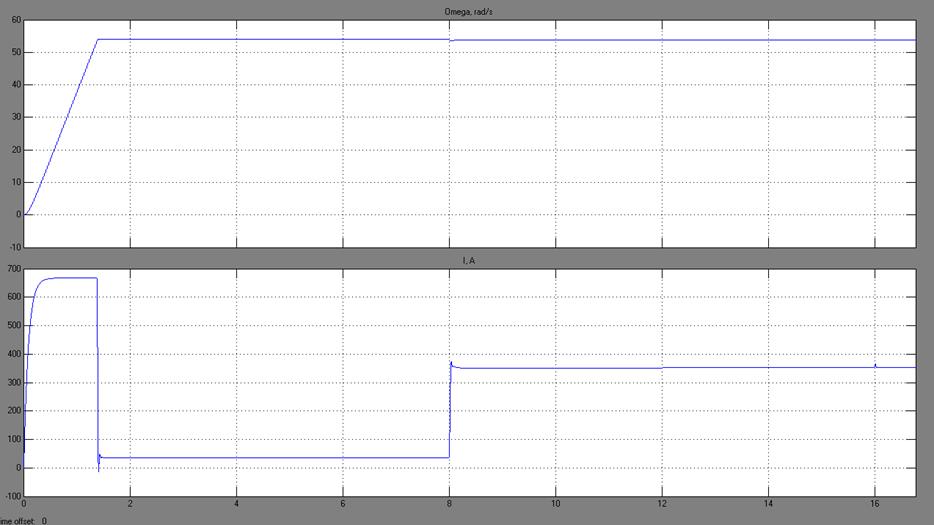
1. Пуск на холостом ходу, u ЗC =0,9∙UЗCН, MС = 0,1⋅MН
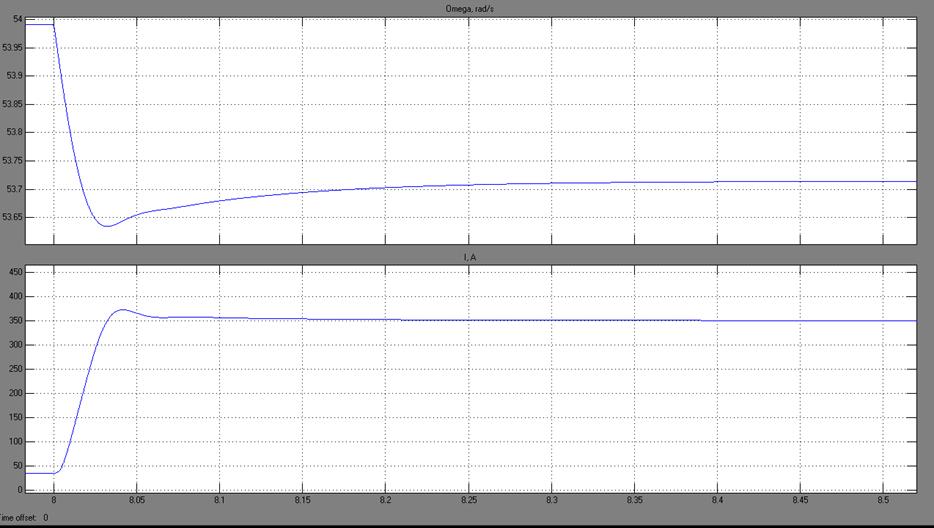
2. По моменту сопротивления, MС = MН
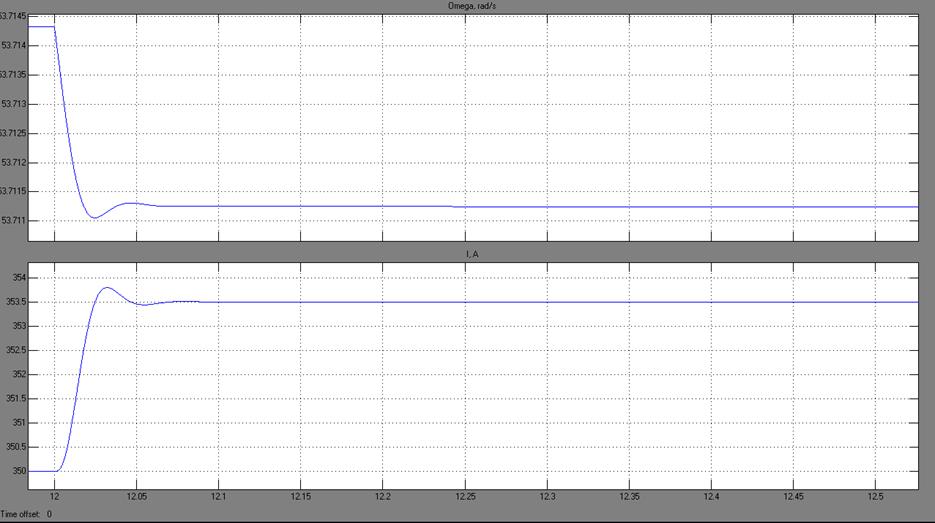
3. По моменту сопротивления “в малом”, MС = 0,01⋅MН
4. По управлению “в малом”, u ЗC =0,001∙UЗCН
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.