И, для настройки на технический оптимум, необходим ПИ-регулятор

Трт = Тя
Для синтеза внешнего контура контур тока заменяется эквивалентным апериодическим звеном
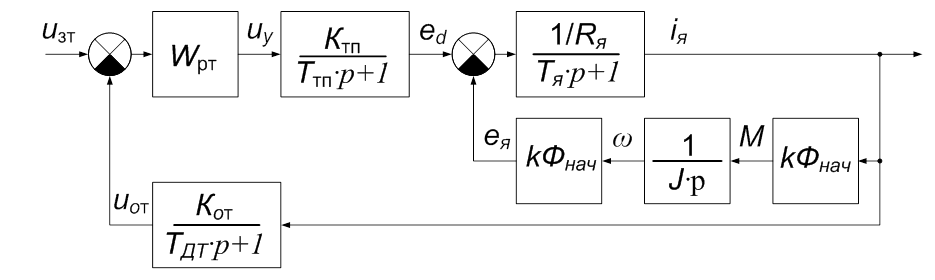
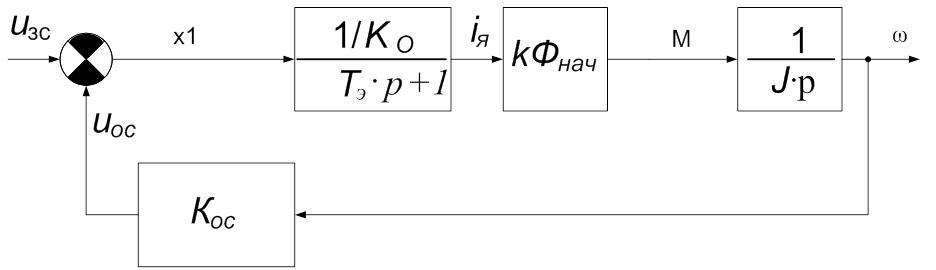
С учетом замены контура тока якоря эквивалентным звеном структурная схема контура скорости, при двухконтурном якорном канале системы управления, будет иметь вид, представленный на рис.6.
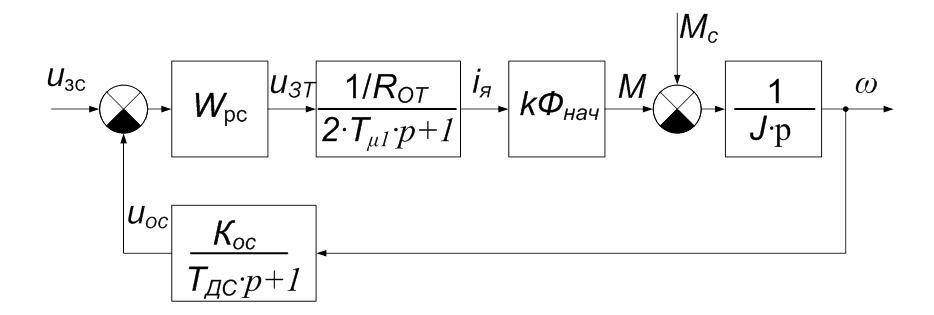
Рис. 6. Структурная схема контура скорости двухконтурной по якорному каналу системы управления
Передаточная функция объекта регулирования контура скорости
Тогда для настройки на технический оптимум необходим П-регулятор

а малая постоянная времени контура скорости определяется постоянной времени контура тока и постоянной времени датчика скорости Тμω = 2TμI + Tдс = 0.00666
Для получения значения статической ошибки контура по моменту сопротивления запишем передаточную функцию замкнутого контура скорости по возмущению

Тогда величина ошибки составит

При скачке момента от нуля до номинального значения отклонение скорости составит
 = 0,159
= 0,159
В относительных единицах
Значение ошибки не превышает допустимого и настройка на симметричный оптимум не требуется.
Ограничение регуляторов тока якоря и возбуждения выбирается равным максимальному значению опорного напряжения СИФУ соответствующих преобразователей
Uрт огр = ±Uоп мах = ±8 В
Уровень ограничения регулятора скорости должен соответствовать заданию максимально допустимого тока якоря
Uрс огр = ± Кот · Iн · λI = ± 0,192 · 26 · 2 = ± 10 В
5.2 Режима прерывистого тока
Для режима прерывистого тока следует произвести синтез регуляторов якорного канала на технический оптимум с учетом изменений структуры и параметров объектов регулирования. При переходе якорного преобразователя в режим прерывистого тока электромагнитные процессы якорной цепи не оказывают влияния на среднее значение тока. Поэтому при синтезе регуляторов якорного канала для режима прерывистого тока следует принять Tя = 0 . Также следует учесть изменение коэффициента передачи преобразователя Kтп' = 4,2 и сопротивления якорной цепи Rя' = 12,18 Ом.
![]() 0,00333
с
0,00333
с

6. Синтез контуров регулирования методом желаемых
частотных характеристик.
Данный метод синтеза обычно применяется, когда метод стандартных настроек контуров дает достаточно сложную структуру регуляторов, либо при сложной структуре объекта управления (например, при двухмассовой схеме механической части). При этом по передаточной функции некомпенсированного разомкнутого контура (без учета регулятора) строится асимптотическая логарифмическая амплитудная характеристика контура. Затем по желаемым динамическим и статическим показателям
строится желаемая логарифмическая амплитудная характеристика контура.
Логарифмическая характеристика регулятора определяется путем геометрического вычитания характеристики некомпенсированного контура из желаемой. Вид полученной характеристики однозначно определяет передаточную функцию регулятора, а частоты сопряжения – его параметры.
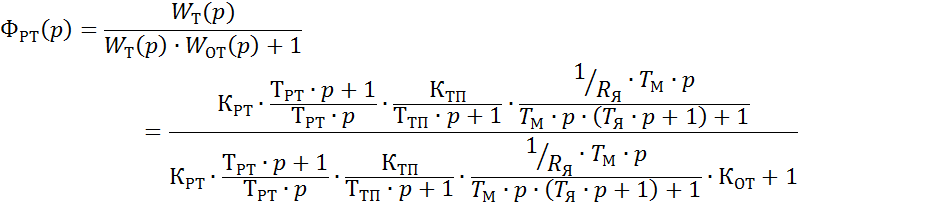
Регулятор тока
Свернём обратную связь по ЭДС:
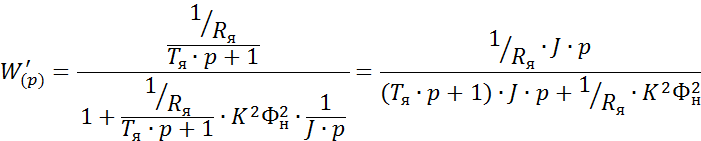
Подставим числовые значения:

Найдём корни уравнения:
0,0396=![]()
![]()
![]()
ξ=![]()
![]()
![]()
Получим:

Передаточная функция контура тока:


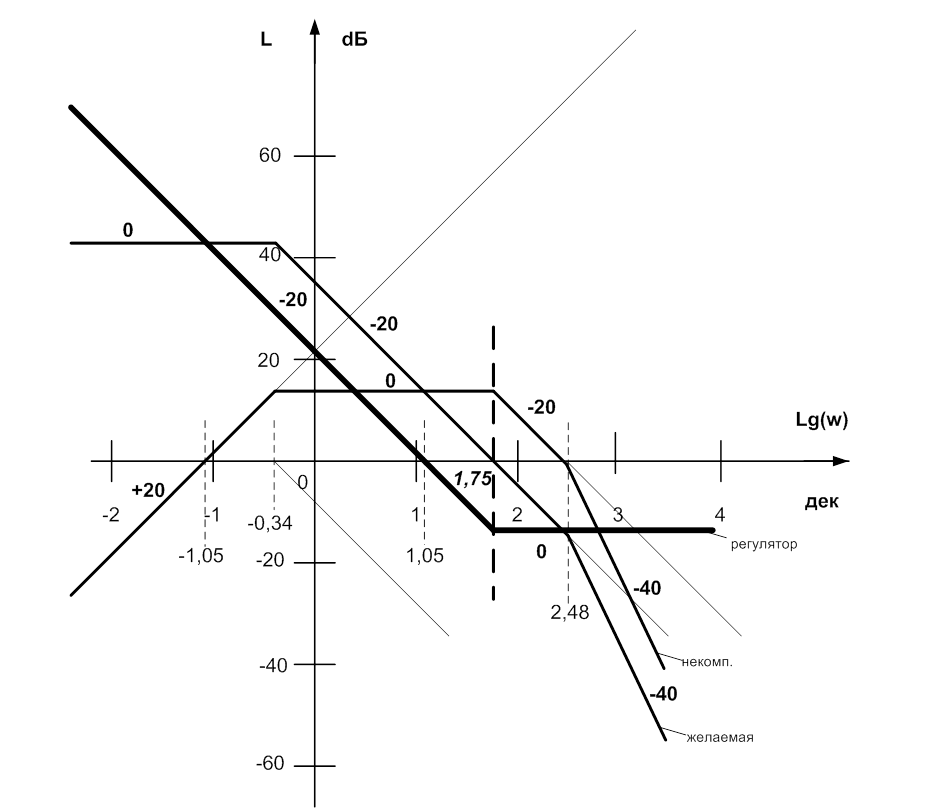
Строим графики:
1)
![]()
2)
![]()
3)
![]()
4)
![]()
Получили ПИ- регулятор: ![]()
Регулятор скорости
Представим внутренний контур в виде:


![]() 1,75
1,75
![]()
Преобразованный контур скорости без регулятора скорости:

1) ![]()
2) ![]()
Строим графики:
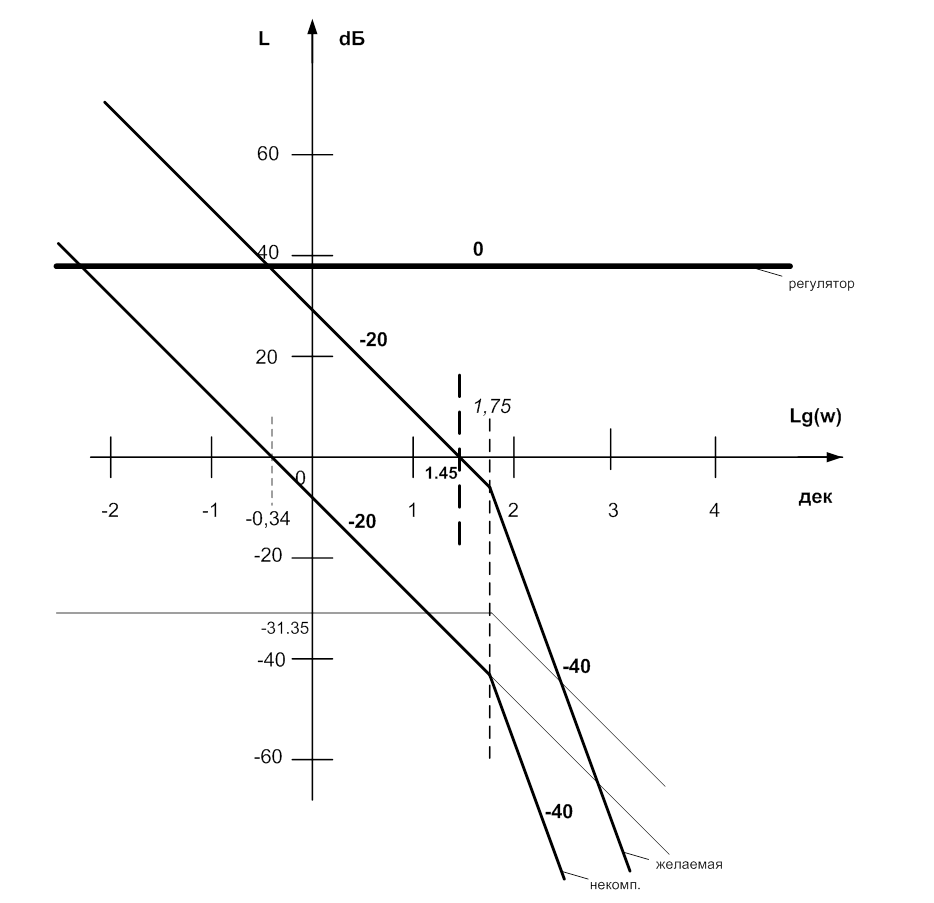
Получили П - регулятор: ![]()
7. Оптимизация контуров регулирования по критерию Баттерворда.
Синтез контура регулятора тока
Запишем передаточную функцию регулятора тока
и передаточную функцию всего контура (пренебрегая инерционностью обратной связи по току):
Для упрощения работы подставим все известные параметры в числовом виде:
![]()



Т.о., получили характеристическое уравнение контура:
![]()
![]()
Делаем нормирование уравнения, для этого вводим оператор s:
получим,



Разделим на ![]() :
:



Приравняем коэффициенты уравнения к стандартным значениям:
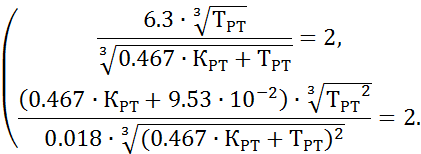
Решим полученную систему уравнений, получим:
![]()
Синтез контура регулятора скорости
Для его синтеза, заменим контур тока эквивалентным апериодическим звеном:
Для нахождения постоянной времени контура тока ![]() найдем
базовую частоту
найдем
базовую частоту ![]() и
приведем к абсолютным значениям относительное время переходного процесса:
и
приведем к абсолютным значениям относительное время переходного процесса:

Теперь приближенно примем:

Запишем передаточную функцию регулятора скорости
![]()
и передаточную функцию всего контура:

Подставим все известные параметры:

Получили характеристическое уравнение контура:
![]()
Сделаем подстановку:


Разделим на ![]() :
:

Приравняем коэффициент к стандартному значению:
Решив полученное уравнение, получим:
![]()
СОДЕРЖАНИЕ
1. Выбор электродвигателя и его параметров
2. Выбор комплектного электропривода. Выбор трансформатора. Расчёт параметров трансформатора и якорной цепи двигателя.
3. Расчёт параметров и характеристик тиристорных преобразователей для режимов непрерывного и прерывистого тока.
4. Выбор структуры системы управления. Расчёт параметров структурной схемы.
5. Синтез контуров регулирования
5.1 Методом стандартных настроек контуров. Расчёт ограничения регуляторов.
5.2 Режим прерывистого тока
6. Синтез контуров регулирования методом частотных характеристик
7. Оптимизация контуров регулирования по критерию Баттерворта
8. Расчёт переходных процессов в «малом» и «большом».
8.1 По критерию Баттерворта
8.2 Метод стандартных настроек
8.3 Метод желаемых частотных характеристик
8.4 Режим прерывистого тока
Приложение 1
Приложение 2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.