Исследование двухпозиционного регулятора температуры
Цели работы:
1. Ознакомление с устройством и принципом действия двухпозиционного регулятора температуры РТ-2;
2. Определение характеристик объекта регулирования;
3. Исследование процесса регулирования.
Методические указания к ознакомительной части работы
Двухпозиционными называются регуляторы, входной сигнал которых (регулирующее воздействие) имеет два фиксированных значения, и переход с одного на другое происходит скачком.
Позиционные регуляторы обязательно включают в себя так называемые элементы прерывного действия, а именно релейные элементы. Статические характеристики, связывающие входной (xвх) и выходной (xвых) сигналы наиболее распространенных релейных элементов, приведены на рис. 1. Реле с характеристикой по рис. 1,а называют идеальным, по рис. 1,6 называют идеальным с зоной возврата (±Δв).
Двухпозиционные регуляторы включают в себя релейные элементы со статическими характеристиками типа изображенных на рис. 1,а
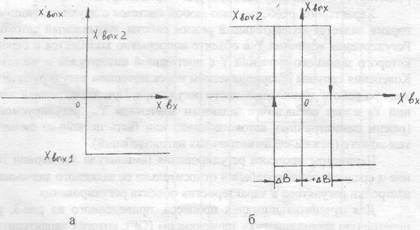
Рис. 1.Статические характеристики релейных элементов
В двухпозиционных регуляторах под хвх понимается отклонение регулируемой величины от заданного значения хзад, а под хвых - регулирующее воздействие. Обычно двухпозиционные регуляторы работают следующим образом: полностью прекращают приток вещества или энергии к объекту регулирования при превышении регулируемой величиной заданного уровня хзад и полностью восстанавливают этот приток при отклонении регулируемой величины от заданного уровня хзад в меньшую сторону. Регулирующее воздействие хвых имеет при этом лишь два значения: хвых1 и хвых2 (рис. 1,a). Одно из значений выходного сигнала двухпозиционного регулятора в этом случае соответствует отключенному состоянию реле, а второе - включенному.
В настоящей работе исследуется система автоматического регулирования (САР) температуры, включающая в себя объект регулирования (термокамеру) и двухпозиционный регулятор типа РТ-2, реализующий статическую характеристику, приведенную на рис. 1,6. Нагрев объекта регулирования осуществляется электролампами, а охлаждение - вентилятором. Регулирующее воздействие xвых1 (см. рис. 1,6) соответствует включенному вентилятору (охлаждение), а xвых2 - включенным лампам (нагрев). Под хвх понимается разность текущей температуры Т и заданной температуры Тзд, т.е. хвх = Т - Тзд. Включение нагрева происходит при хвх = Т - Тзд - Δв, а включение охлаждения - при хвх = Т – Тзд + Δв.
Принципиальная схема САР температуры показана на рис. 2, где S1 - тумблер включения сети; S2 - тумблер включения регулирующего воздействия; РТ - регулятор температуры, в котором контакты реле К1 обеспечивают формирование регулирующего воздействия; ОР - объект регулирования, в котором размещены регулирующие органы: лампы HL1 - HL4 для нагрева среды, вентилятор с электроприводом М - для ее охлаждения; датчик температуры (терморезистор) Rt и индикатор температуры (термометр) ИТ.
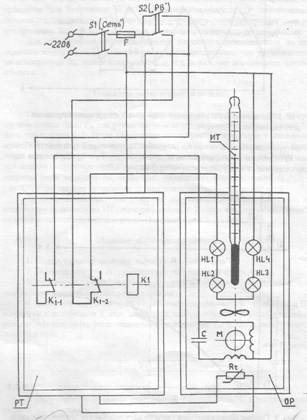
Рис. 2 Принципиальная схема САР температуры
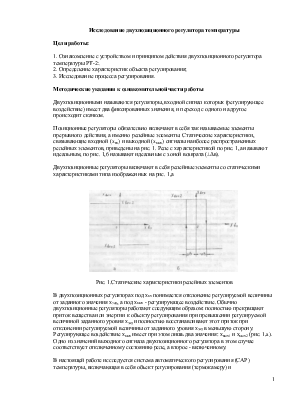
Характерной особенностью любой системы с двухпозиционными регуляторами является колебательный режим работы, называемый автоколебаниями. Регулируемая величина Y в объекте непрерывно колеблется в окрестности некоторого заданного значения Y с постоянной амплитудой и частотой (рис. 3). Колебания связаны с периодическим переключением регулирующего воздействия при работе двухпозиционного регулятора.
При этом средняя линия колебаний Y0 может совпадать с заданным значением Yзад регулируемой величины (режим симметричных автоколебаний) или быть несколько смещена относительно него (режим несимметричных автоколебаний).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.