|
Введение |
|
Целью расчетно - графической работы является исследование поведения электродвигателя постоянного тока независимого возбуждения в переходном режиме. Необходимо составить и проанализировать математическую модель канала |
|
|
|
/ |
|
|
|
Исследование производится по математической модели канала с помощью ПЭВМ по стандартным программам решения систем дифференциальных уравнений, записанных в форме Коши. |
|
1. Разработка математической модели |
|
Электродвигатель постоянного тока состоит из двух основных частей : индуктора(неподвижная часть) и якоря(вращающаяся часть). Индуктор состоит из стального полого цилиндрического ярма, к которому изнутри прикреплены стальные полюса с обмоткой возбуждения. Обмотка возбуждения при протекании по ней тока создаёт основной магнитный поток электродвигателя. Якорь состоит из цилиндрического сердечника, собранного из листов электротехнической стали, и закреплённой в пазах сердечника обмотки якоря. Якорь располагается внутри индуктора в магнитном поле, создаваемом полюсами с обмоткой возбуждения . Поэтому при протекании тока по обмотке якоря возникают электромагнитные силы (по закону Ампера), которые, воздействуя на витки якорной обмотки, заставляют якорь вращаться и преодолевать момент нагрузки, приложенный к валу двигателя. Выделим мысленно в двигателе постоянного тока независимого возбуждения (ДПТ НВ) три основные части : электрическую, магнитную и механическую; остальными частями прнебрежем. При составлении схем замещения будем пренебрегать сопротивлением щёточно-колекторного узла, ёмкостью обмоток, магнитными потоками рассеяния, действиями вихревых токов. Кроме того будем считать индуктивности обмоток постоянными, поскольку ЭД работает на линейном участке кривой намагничивания. В механической части будем учитывать только момент нагрузки от рабочей машин , остальными моментами трения пренебрежём . Кроме того будем учитывать в механической части момент инерции якоря и нагрузки. Поскольку учитывается только линейная часть кривой намагничивания, то схема замещения магнитной цепи ЭД не потребуется. |
|
Схемы замещения |
|
|
|
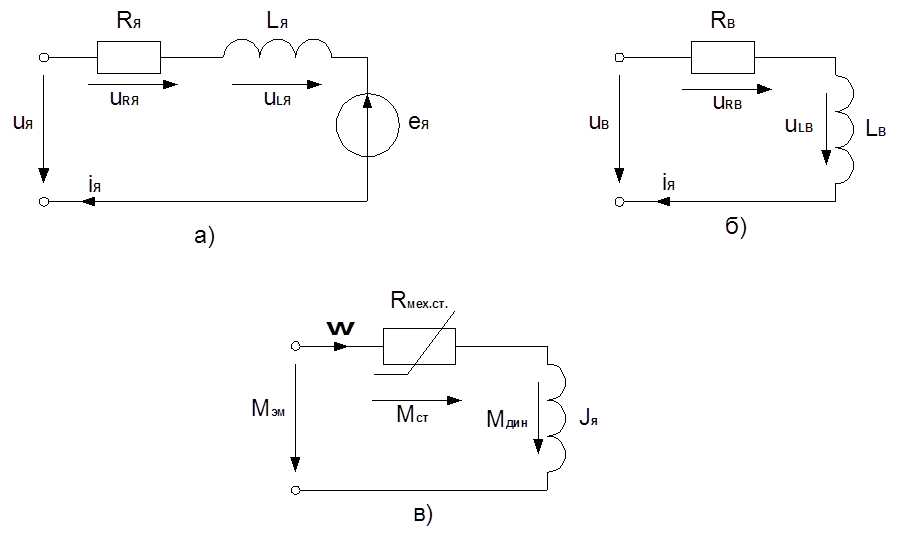
Рис. 1. Схемы замещения обмотки якоря (а), обмотки возбуждения (б) и механической части (в) ДПТ НВ. |
|
На схемах обозначено: |
|
|
|
- напряжения и токи в обмотках якоря и возбуждения. |
|
|
|
- активные сопротивления и индуктивности обмоток якоря и возбуждения. |
|
|
|
- ЭДС якоря , возникающая в якорной обмотке по закону Фарадея из-за её вращения в магнитном потоке возбуждения. |
|
|
|
- электромагнитный момент и угловая скорость якоря. |
|
|
|
- момент инерции якоря и нагрузки. |
|
|
|
- механическое сопротивление сухого трения , создающее постоянный (статический) нагрузочный момент Mст , не зависящий от угловой скорости w якоря. |
|
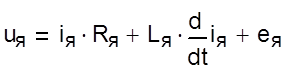
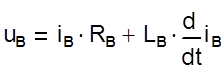
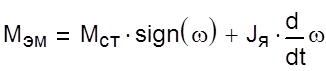
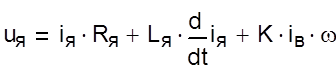
Составим систему дифференциальных уравнений по законам Кирхгофа и Ньютона |
|
|
|
|
|
|
|
|
|
|
|
|
|
Функция sign(w) находится в зависимости от направления вращения якоря электродвигателя . Данная система уравнений недостаточна, поскольку она имеет три уравнения для пяти неизвестных величин ( iя, iв, eя, w, Mэм ) при трех заданных величинах ( uя, uв, Mст ). Дополним эту систему уравнений двумя алгебраическими уравнениями известными из теории электрических машин. |
|
|
|
|
|
|
|
- конструктивная константа электродвигателя. |
|
|
|
- магнитный поток возбуждения. |
|
|
|
- коэффициент пропорциональности между потоком и током. |
|
Тогда в целом математическая модель ДПТ НВ в абсолютных переменных примет следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
Получение математической модели ДПТ НВ в относительных переменных в форме Коши. |
|
Запись математической модели в форме Коши, когда система дифференциальных уравнений решена относительно первых производных от неизвестных величин, и переход от абсолютных переменных к относительным позволяет упростить и сделать математическую удобной для исследования. С этой целью первоначально расцепим дифференциальную и алгебраическую части модели ДПТ НВ за счет подстановки. |
|
|
|
|
|
|
|
где |
|
|
|
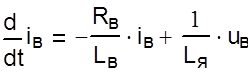
Представим расцепленную систему дифференциальных уравнений в форме Коши: |
|
|
|
|
|
|
|
Представим математическую модель в относительных величинах. Переход от абсолютных переменных величин осуществляется за счет деления этих величин на базовые значения тех же физических переменных. В математических моделях электромеханических систем за базовые величины рекомендуется принимать номинальные паспортные значения электродвигателя. |
|
|
|
- относительный ток якоря |
|
|
|
- относительный ток возбуждения |
|
|
|
- относительная скорость вращения |
|
|
|
- относительное напряжение якоря |
|
|
|
- относительное напряжение возбуждения |
|
|
|
- относительный момент нагрузки |
|
|
|
Рассмотрим как приводится дифференциальное уравнение в абсолютных переменных к дифференциальному уравнению в относительных переменных на примере дифференциального уравнения для якорной обмотке. |
|
|
|
Кроме перечисленных переменных относительных величин введём и относительное время t |
|
|
|
где |
|
|
|
- постоянная времени якорной обмотки. |
|
|
|
|
|
|
|
Если проделать подобные преобразования с остальными уравнениями математической модели то оканчательно мы получим математическую модель ДПТ НВ в относительных переменных в следующум виде: |
|
|
|
|
|
|
|
В этой математической модели введены относительные параметры: |
|
|
|
- относительное значение коэффициента передачи якорной цепи |
|
|
|
- относительная постаянная времени обмотки возбуждения |
|
где |
|
|
|
- абсолютная постоянная времени обмотки возбуждения |
|
|
|
- относительная электромеханическая постоянная времени |
|
где |
|
|
|
- абсолютная электромеханическая постоянная времени |
|
2. Получение математической модели канала: |
|
|
|
/ |
|
|
|
В соответствии с заданием
для данного канала требуется рассчитать переходной процесс по
электромагнитному моменту напряжения на обмотке
возбуждения При этом все остальные известные величины равны номинальным значениям в исходном состоянии. Начальными значениями известных являются |
|
|
|
|
|
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.