









21. Компенсация влияния изменения магнитного потока
Если магнитный поток и скорость отличаются от принятых при настройке значений, то быстродействие контуров регулирования снижается.
Для
сохранения динамических показателей может быть использована схемная
компенсация. В контуре скорости причиной изменения является магнитный
поток (коэффициент передачи от ![]() до M ).
до M ).
Для компенсации изменения потока необходимо либо изменять коэффициент передачи регулятора скорости, либо делить выходной сигнал регулятора на величину, пропорциональную «Ф» . Получить сигнал, пропорциональный потоку затруднительно, поэтому можно использовать сигналы обратных связей по скорости и ЭДС.

Но при этом на выходе регулятора скорости требуется применение достаточно сложного устройства.
Более просто компенсация изменения потока реализуется в некоторых электроприводах за счет применения адаптивного регулятора скорости.
Рассмотрим на примере комплектного электропривода серии БТУ.
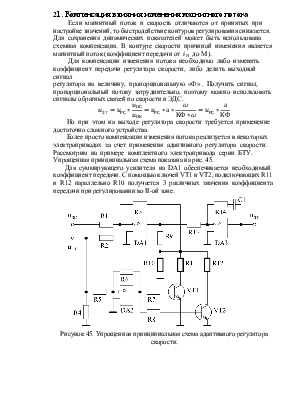
Упрощенная принципиальная схема показана на рис. 45.
Для суммирующего усилителя на DA1 обеспечивается необходимый коэффициент передачи. С помощью ключей VT1 и VT2, подключающих R11 и R12 параллельно R10 получается 3 различных значения коэффициента передачи при регулировании во II-ой зоне.
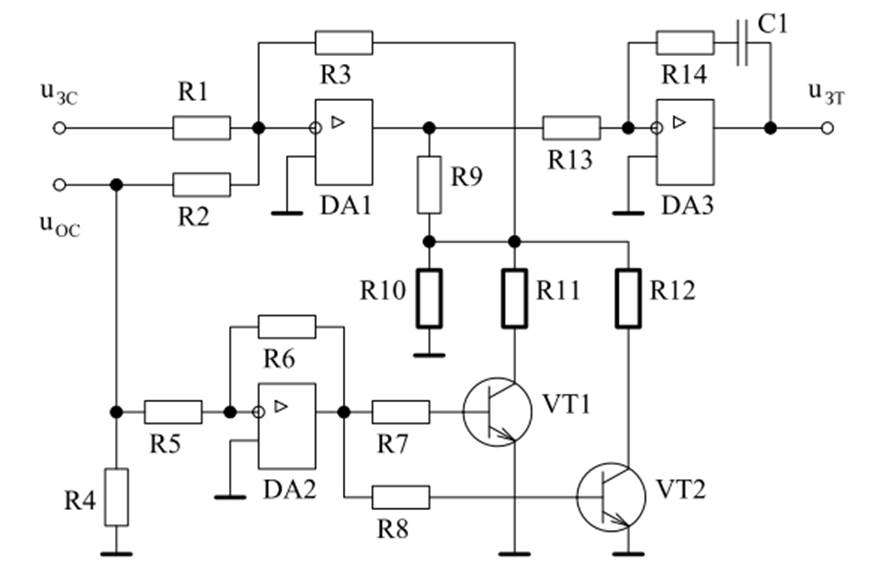
Рисунок 45. Упрощенная принципиальная схема адаптивного регулятора
скорости.
22. Ограничение якорного тока
При
большой постоянной времени ![]() , когда при резком изменении угла
открывания тиристоров изменение тока якоря за один интервал проводимости
по сравнению со значением
, когда при резком изменении угла
открывания тиристоров изменение тока якоря за один интервал проводимости
по сравнению со значением ![]() Я I будет мало.
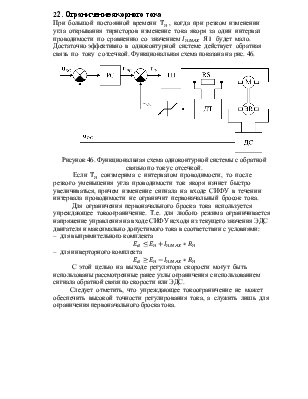
Достаточно эффективно в одноконтурной системе действует обратная связь
по току с отсечкой. Функциональная схема показана на рис. 46.
Я I будет мало.
Достаточно эффективно в одноконтурной системе действует обратная связь
по току с отсечкой. Функциональная схема показана на рис. 46.
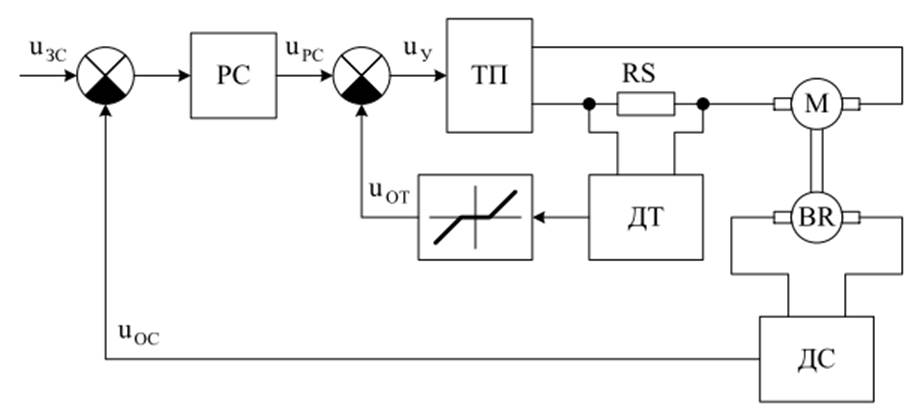
Рисунок 46. Функциональная схема одноконтурной системы с обратной связью по току с отсечкой.
Если ![]() соизмерима с интервалом
проводимости, то после резкого уменьшения угла проводимости ток якоря
начнет быстро увеличиваться, причем изменение сигнала на входе СИФУ в
течении интервала проводимости не ограничит первоначальный бросок тока.
соизмерима с интервалом
проводимости, то после резкого уменьшения угла проводимости ток якоря
начнет быстро увеличиваться, причем изменение сигнала на входе СИФУ в
течении интервала проводимости не ограничит первоначальный бросок тока.
Для ограничения первоначального броска тока используется упреждающее токоограничение. Т.е. для любого режима ограничивается напряжение управления на входе СИФУ исходя из текущего значения ЭДС двигателя и максимально допустимого тока в соответствии с условиями:
– для выпрямительного комплекта
![]()
– для инверторного комплекта
![]()
С этой целью на выходе регулятора скорости могут быть использованы рассмотренные ранее узлы ограничения с использованием сигнала обратной связи по скорости или ЭДС.
Следует отметить, что упреждающее токоограничение не может обеспечить высокой точности регулирования тока, а служить лишь для ограничения первоначального броска тока.
23. Регулирование уравнительного тока
При совместном управлении комплектами тиристоров линейное согласование
углов выпрямительной и инверторной групп вызывает значительный
уравнительный ток. Используют регулирование уравнительного тока на уровне ![]() за счет воздействия на инверторный
комплект в сторону увеличения угла открывания.
за счет воздействия на инверторный
комплект в сторону увеличения угла открывания.
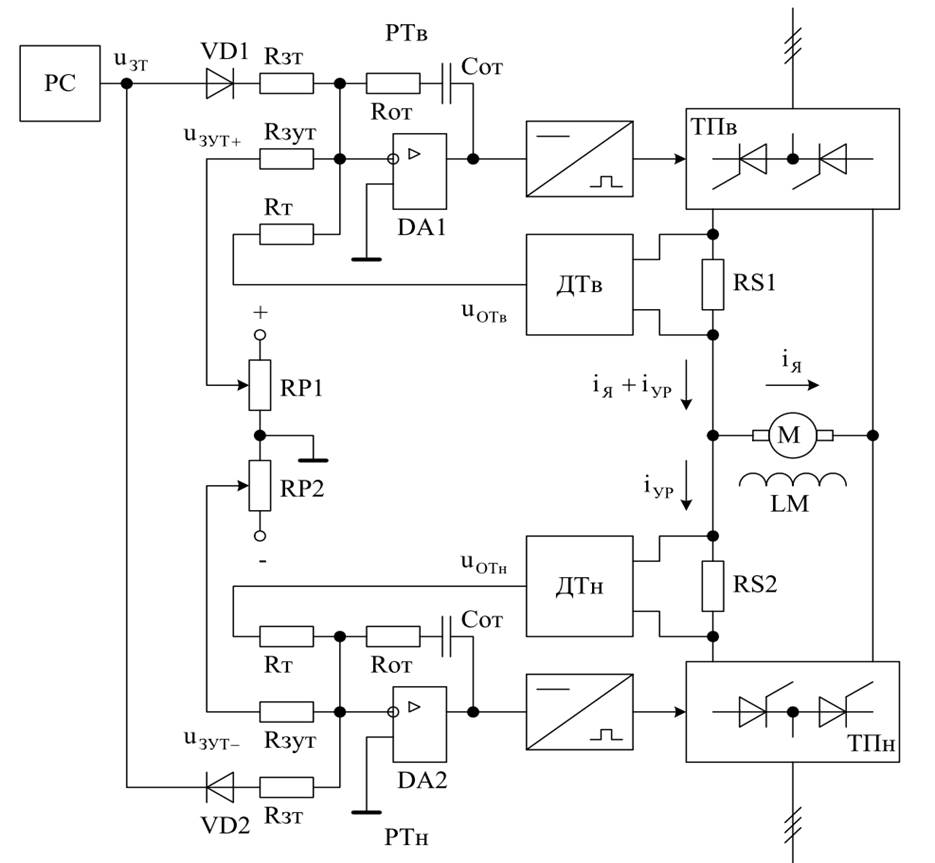
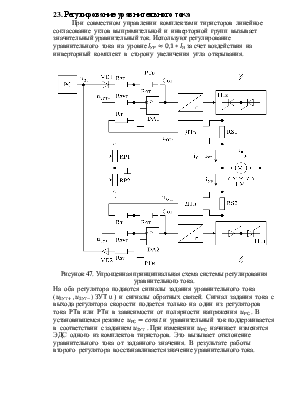
Рисунок 47. Упрощенная принципиальная схема системы регулирования
уравнительного тока.
На
оба регулятора подаются сигналы задания уравнительного тока (![]() ) ЗУТ u ) и сигналы обратных
связей. Сигнал задания тока с выхода регулятора скорости подается
только на один из регуляторов тока РТв или РТн в зависимости от
полярности напряжения
) ЗУТ u ) и сигналы обратных
связей. Сигнал задания тока с выхода регулятора скорости подается
только на один из регуляторов тока РТв или РТн в зависимости от
полярности напряжения ![]() . В установившемся режиме
. В установившемся режиме ![]() и уравнительный ток поддерживается
в соответствии с заданием
и уравнительный ток поддерживается
в соответствии с заданием ![]() . При изменении
. При изменении ![]() начинает изменятся ЭДС одного из
комплектов тиристоров. Это вызывает отклонение уравнительного тока от заданного
значения. В результате работы второго регулятора восстанавливается
значение уравнительного тока.
начинает изменятся ЭДС одного из
комплектов тиристоров. Это вызывает отклонение уравнительного тока от заданного
значения. В результате работы второго регулятора восстанавливается
значение уравнительного тока.
24.Двухконтурная САР тока.
Одним из вариантов двухконтурной системы регулирования тока является система с подчиненным контуром регулирования напряжения преобразователя. В режиме непрерывного тока напряжение на выходе преобразователя:
 ,
,
где ![]() ,
, ![]() активное сопротивление и индуктивность
силовой цепи преобразователя и участка якорной цепи до зажимов датчика
напряжения.
активное сопротивление и индуктивность
силовой цепи преобразователя и участка якорной цепи до зажимов датчика
напряжения.
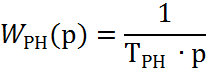
Получим передаточную функцию объекта регулирования контура напряжения![]() от
от ![]() до
до ![]()
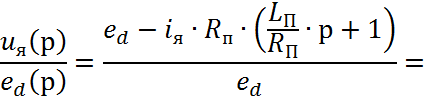
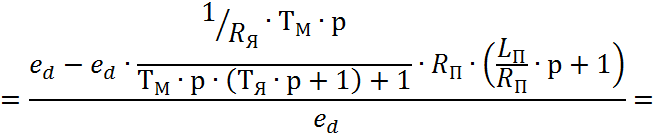






Если частота среза контура напряжения выше сопрягающих частот объекта регулирования, то рассматривая только высокочастотную часть объекта регулирования:
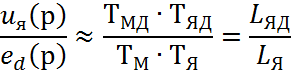
Т.о. для настойки на технический оптимум необходим интегрирующий регулятор:
Если датчик
напряжения с апериодическим фильтром и ![]() , то применяют П-регулятор.
, то применяют П-регулятор.
В двухконтурном регуляторе тока на регулятор напряжения подается положительная обратная связь по току.
25.Компенсация нелинейностей режима прерывистого тока.
ЭДС преобразователя можно представить как сумму двух составляющих:
1. ![]() равна ЭДС, которая является непрерывной.
равна ЭДС, которая является непрерывной.
2. ![]() равна падению напряжения от тока
нагрузки.
равна падению напряжения от тока
нагрузки.
Для первой составляющей нелинейность преобразователя проявляется при пилообразном опорном напряжении в нелинейности регулировочной характеристики в режиме непрерывного тока. Для ее компенсации на вход СИФУ нужно подавать сигнал, пропорциональный ЭДС через звено с арксинусной характеристикой:
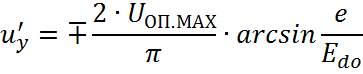
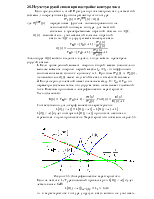
Для второй составляющей нелинейность проявляется только в режиме прерывистого тока в соответствии с зависимостью
![]() . Характер этой зависимости различен при
различных значениях
. Характер этой зависимости различен при
различных значениях ![]() , однако на практике достаточно
настроить соответствующее нелинейное звено при
, однако на практике достаточно
настроить соответствующее нелинейное звено при ![]() для компенсации нелинейности,
показанной на рис.1.
для компенсации нелинейности,
показанной на рис.1.
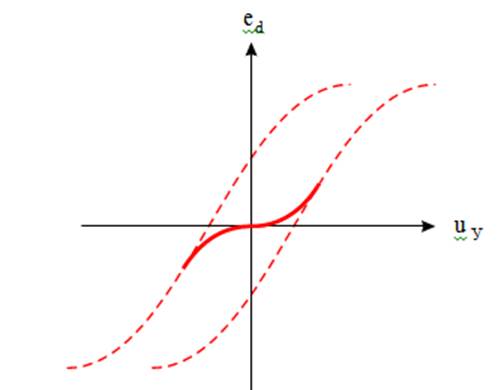
Рис.1. Регулировачная характиристика преобразователя с учетом режима прерывистого тока.
26.Адаптивный регулятор тока.
В режиме непрерывного тока объект управления контура тока представляет собой апериодическое звено
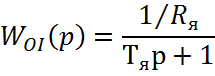
с постоянными параметрами, а регулятор тока при настройке на технический оптимум – ПИ
 НЗ
НЗ
Uрт
(uрт)
Uтг
(uдн)
ФПЕ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.