Рисунок 49. Функциональная схема компенсации нелинейностей
преобразователя.
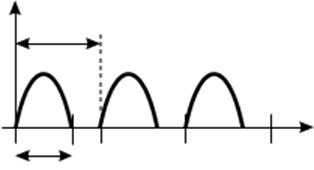
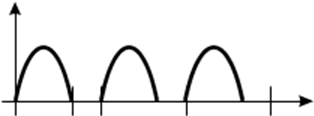
В режиме прерывистого тока ток начинает протекать и спадает до нуля за один интервал проводимости тиристоров, как показано на рис. 50.
i
 T
T
t
ωt
![]()
Рисунок 50. Диаграмма тока в режиме прерывистого тока.
Среднее значение тока устанавливается в первый же такт коммутации. Т.о., рассматривая
систему с непрерывной частью, для которой полоса пропускания
меньше частоты коммутации тиристоров ![]() , электромагнитной
инерционностью в силовой цепи можно пренебречь.
, электромагнитной
инерционностью в силовой цепи можно пренебречь.
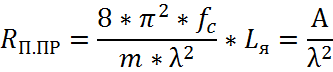
Расcматривая зависимость Ed(I) и Ed(λ) в соответствии с внешними характеристиками преобразователя в режиме прерывистого тока, существенное изменение ЭДС можно представить как изменение внутреннего сопротивления силовой цепи преобразователя Rп при неизменной ЭДС Ed.
С достаточной точностью зависимость внутреннего сопротивления от угла проводимости описывается формулой
С уменьшением тока интервал проводимости изменяется от ![]() до 0. При этом Rп возрастает до
бесконечности. Для режима прерывистого тока можно
принять, что
до 0. При этом Rп возрастает до
бесконечности. Для режима прерывистого тока можно
принять, что ![]() . Т.о. объект управления контура тока
. Т.о. объект управления контура тока
Сдесь на ТО необходим И-регулятор

Соответственно при переходе в режим прерывистого тока регулятор тока должен менять с ПИ на И.
При этом
![]()
Подобного типа регулятор применяется в комплектных электроприводах серии КТЭ.
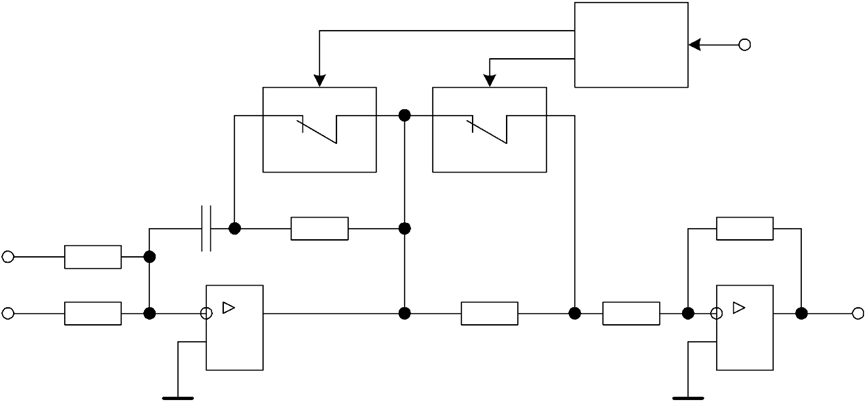
На схеме обозначено: УК1, УК2 – управляемые ключи; БУК – блок управления ключами.
В режиме непрерывного тока большой сигнал с датчика тока приводит к размыканию ключей УК1 и УК2. Коэффициент передачи усилителя на DA2
а структура регулятора – ПИ.
 Uдт
Uдт
БУК
УК1 УК2
С1 R3 R6
Uзт R1
DA1 R4 R5 DA2 Uy
Uот R2
Рисунок 51. Упрощенная принципиальная схема адаптивного регулятора тока.
Если сигнал с датчика тока имеет форму тока, то при наличии бестоковой паузы БУК замыкает УК1 и переводит УК2 в импульсный режим.
Структура регулятора меняется на И. УК2 управляется широтно-импульсной модуляцией. Управляющее напряжение модулятора должно пройти квадратичный функциональный преобразователь, чтобы скважность работы
УК2
была пропорциональна ![]() .
.
где
![]() – период модуляции,
– период модуляции, ![]() - интервал замкнутого состояния
УК2.
- интервал замкнутого состояния
УК2.
Тогда, с уменьшением ![]() , коэффициент передачи регулятора
будет изменяться
от минимального до какого-то максимального значения с зависимостью,
обратной
, коэффициент передачи регулятора
будет изменяться
от минимального до какого-то максимального значения с зависимостью,
обратной ![]() .
.
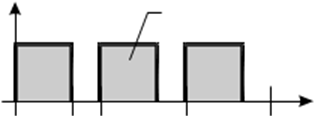
Настройку регулятора можно упростить, если модулирующим сигналом использовать импульсы от датчика тока, как показано на рис. 52.
При
таком построении коэффициент передачи регулятора тока будет обратно пропорционален
углу проводимости ![]() .
.
На практике, как правило, датчик тока имеет инерционность (выходной фильтр узла гальванической развязки) и его выходной сигнал не соответствует действительной форме тока. Поэтому на вход БУК подают сигнал задания тока Uзт , и производят настройку узла на конкретные параметры силовой части данного электропривода.
Подобные схемы регулятора (с конечным коэффициентом передачи регулятора)
применяют когда ток холостого хода отличен от нуля ![]()
![]()
t
Uбук УК2 разомкнут
t
Рисунок 52. Диаграмма напряжения БУК.
27. Объект управления с учетом упругой связи
Введем в двухмассовую схему дополнительно момент внутреннего трения от действия диссипативных сил, пропорциональный разности скоростей концов упругой связи.
M ВТ = bВТ × (w1 - w2 ) .
Теперь объект управления с учетом якорной цепи двигателя описывается системой уравнений
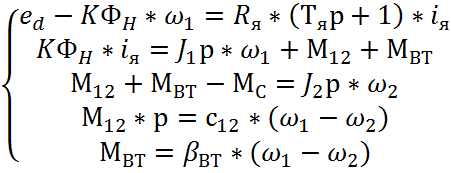
Обозначив упругий момент
![]()
получим структурную схему объекта управления, представленную на рис. 53.

Рисунок 53. Структурная схема силовой части электропривода с учетом
упругой механической связи.
Для упрощения схемы и получения передаточных функций объекта используется обобщенный параметр – период колебаний упругой связи
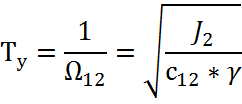
где ![]() - коэффициент жесткости упругой связи,
- коэффициент жесткости упругой связи,
![]() - коэффициент соотношения масс.
- коэффициент соотношения масс.
Пренебрегая внешними силами (![]() ), после преобразований получим структурную
схему, показанную на рис. 54.
), после преобразований получим структурную
схему, показанную на рис. 54.
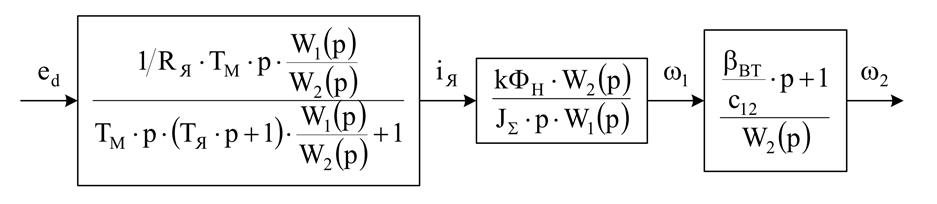
Рисунок 54. Преобразованная структурная схема силовой части
электропривода с учетом упругой механической связи.
На схеме ![]() и
и ![]() – полиномы, характеризующие
1-ю и 2-ю массы.
– полиномы, характеризующие
1-ю и 2-ю массы.
![]()
![]()
где ![]() - период колебаний второй
массы
- период колебаний второй
массы

 - коэффициент демпфирования
упругих колебаний
- коэффициент демпфирования
упругих колебаний
 - коэффициент
демпфирования колебаний второй массы
- коэффициент
демпфирования колебаний второй массы
Когда частота упругих колебаний соизмерима с полосой пропускания соответствующего контура регулирования, то необходимо проверить влияние упругой связи.
28. Неучет упругой связи при настройке контура тока
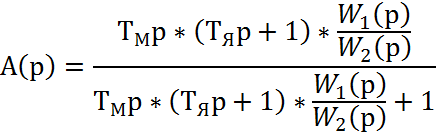
Если предположить, что ПИ-регулятор тока настроен как для жесткой системы, то передаточная функция разомкнутого контура
![]()
где ![]() - передаточная функция
оптимизированного на технический оптимум контура для
жесткой системы с пренебрежением обратной
связью по ЭДС,
- передаточная функция
оптимизированного на технический оптимум контура для
жесткой системы с пренебрежением обратной
связью по ЭДС,
![]() - сомножитель,
учитывающий влияние обратной связи по ЭДС и упругую механическую
связь
- сомножитель,
учитывающий влияние обратной связи по ЭДС и упругую механическую
связь
Анализируя ![]() можно выделить случаи,
когда можно пренебречь упругой связью.
можно выделить случаи,
когда можно пренебречь упругой связью.
1. Если
приведенный момент инерции второй массы значительно меньше момента
инерции первой массы ![]() , то коэффициент соотношения масс близок
к единице
, то коэффициент соотношения масс близок
к единице ![]() . При этом
. При этом ![]() , и сомножитель
, и сомножитель ![]() имеет вид такой же как и в
жесткой системе.
имеет вид такой же как и в
жесткой системе.
2. Когда
период колебаний имеет значение между ![]() , но параметры системы
такие, что упругая связь не вызывает колебаний тока. Поясним при помощи
логарифмических характеристик.
, но параметры системы
такие, что упругая связь не вызывает колебаний тока. Поясним при помощи
логарифмических характеристик.
Если обозначить

Соответственно для логарифмических характеристик
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.