
Рис. 5.3. Электрическая схема регулятора тока.
Т = R2·C1= 54·10-3 с.
Принимаем:
С1 = 1,5 мкФ, тогда
R2 = Т/С1 = 54·10-3 / 1,5·10-6 = 36 кОм.
Принимаем: R2 = 36 кОм.
Принимаем: R1 = 30 кОм.
2) Регулятор скорости.

Рис. 5.4. Электрическая схема регулятора скорости.
Принимаем: R2 = 2,4 МОм, тогда
Принимаем: R1 = 3 кОм
Расчет задатчика интенсивности
Принципиальная электрическая схема задатчика интенсивности изображена на рис.5.5.
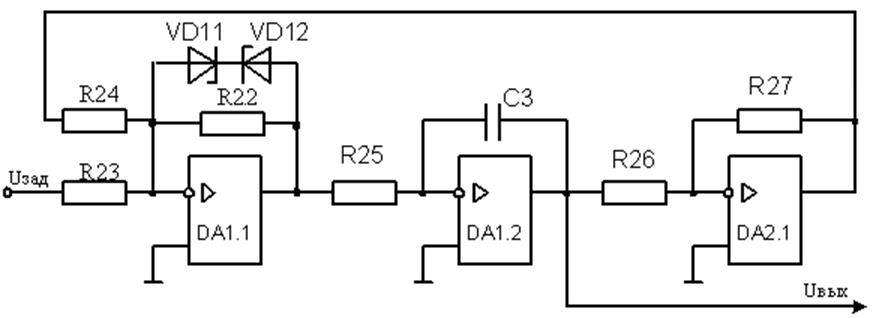 Рис. 5.5. Электрическая схема задатчика интенсивности .
Рис. 5.5. Электрическая схема задатчика интенсивности .
Нелинейный элемент реализуется на операционном усилителе DA1.1 за счет включения в обратную связь пары стабилитронов VD11 и VD12. Интегратор реализуется на операционном усилителе DA1.2. Усилитель DA2.1 предназначен для инвертирования сигнала.
Принимаем:
![]()
Коэффициент усиления линейной зоны нелинейного элемента принимаем равным 100.
![]()
Емкость в обратной связи интегратора:
Радиус приведения:
Угловое ускорение:
где а =3 м/с² -- допустимое ускорение рабочих валков.
Темп ЗИ представляет собой величину ускорения электропривода в относительных единицах:
Принимаем постоянную времени интегратора ТИ = 0,25 с. При этом величина ограничения нелинейного элемента составит:
![]()
В абсолютных единицах ограничение соответствует 10 В
6. АНАЛИЗ СТАТИЧЕСКИХ ПОКАЗАТЕЛЕЙ
Найдем передаточную функцию замкнутого контура тока:

Рис. 6.1. Структурная схема контура скорости.
Рис. 6.2. Преобразованная к статическому режиму структурная
схема контура скорости.
Статическая характеристика контура скорости по управлению:
 (статическая ошибка по
управлению равна нулю).
(статическая ошибка по
управлению равна нулю).
Для получения значения статической ошибки контура по моменту сопротивления запишем передаточную функцию замкнутого контура скорости по возмущению

Тогда величина ошибки составит

При скачке момента от нуля до номинального значения отклонение скорости
составит

Величина отклонения скорости от установившегося значения <5% и составляет:

Диапазон регулирования скорости:
Следовательно, пониженная угловая скорость:

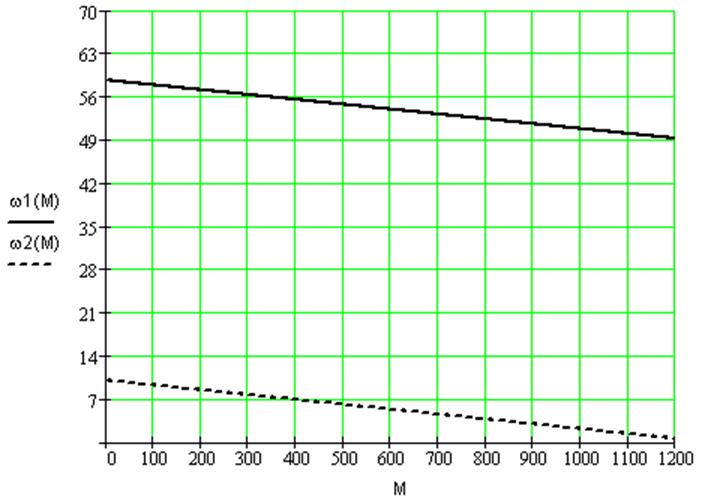
Рис. 6.3. Статические характеристики замкнутого(1) ЭП, на пониженной скорости(2).
8. СИНТЕЗ И РАСЧЁТ УЗЛОВ ОГРАНИЧЕНИЙ И ЗАЩИТ
При синтезе системы автоматического управления за основу брали схему электропривода КТЭУ. В качестве системы защит возьмём узел защиты данного электропривода.
Система защит и сигнализации осуществляет следующие виды защит:
1) Защита от внутренних коротких замыканий.
При выходе из строя тиристоров осуществляется путем блокировки управляющих импульсов по сигналу срабатывания герконовых датчиков на стороне переменного тока и отключения автоматических выключателей.
2) Защита при превышении мгновенного значения тока.
Осуществляется с помощью электронной токовой защиты совместно с автоматическим выключателем. Электронная токовая защита обеспечивает достаточное быстродействие, сдвигая импульсы управления силовых тиристоров в инверсную область с последующим их блокированием. Сигналы токовой защиты поступают с датчиков, герконовых и полупроводникового. Настройку уставки герконовых датчиков необходимо производить сначала на стороне постоянного тока (в реверсивных КТЭУ), а затем переменного тока при рабочем напряжении главных цепей и отключенном датчике тока S402A (А22).
3) Защита при аномальных режимах в сети собственных нужд.
Реализована на ячейке ключей № 501В. При аномомальных режимах в сети собственных нужд, например таких как снижение напряжения собственных нужд более чем на 15% от номинального, обрыве фазы, сигнал с выхода ячейки № 501В поступает на вход ячейки памяти № 617, где происходит формирование общего аварийного сигнала, воздействующего на откключение КТЭ.
4) Защита при опрокидывании и прорыве инвертора.
5) Защита при появлении уравнительных токов (для реверсивных КТЭУ).
6) Защита при неисправности источника стабилизированного напряжения, плюс, минус 12,6.
7) Защита при аварийной перегрузке тиристоров по среднеквадратичному току.
Для данной защиты используется сигнал с датчика тока S402A. Защита собрана на ячейке защиты от перегруза № 314. При достижении током КТЭУ значения 1,5I с выдержкой времени происходит аварийное отключение КТЭУ по каналу среднеквадратичной токовой перегрузки тиристоров.
8) Защита при превышении или при снижении ниже допустимого уровня тока возбуждения электродвигателя.
Она собрана на пороговых устройствах № 501В, № 311. Уставки срабатывания защит регулируются переменными резисторами R24, R32 ячеек № 501В и № 311 соответственно, таким образом, чтобы срабатывание защиты происходилопри превышении тока возбуждения выше 1,25Iн и при снижении тока возбуждения ниже 0,7Iн.
9) Защита при снижен ниже допустимого уровня или исчезновении тока обмотки возбуждения тахогенератора.
В систему защиты и сигнализации поступают дискретные сигналы о недопустимом понижении тока возбуждения тахогенератора из системы вспомогательных устройств, о неисправности источника стабилизированного напряжения плюс, минус 12,6 V. Эти сигналы воздествуют непосредственно на ячейку памяти № 617.
10) Защита при недопустимом превышении напряжения на якоре двигателя.
11) Защита при превышении допустимой скорости вращения электродвигателя.
Сигнал о превышении допустимой скорости вращения ЭД поступает на вход ячейки № 617, где формируется общий аварийный сигнал, который воздействует на отключение КТЭУ.
12) Защита при выходе из строя предохранителей системы защиты от перенапряжений и при исчезновении напряжения силовых цепей.
13) Защита от перегрузки двигателя превышающей величину заданную в течение определенного времени до 20с (при недопустимом времени стоянки двигателя под током).
Данная защита собрана на ячейке № 314. Время стоянки двигателя под током регулируется с помощью переменного резистора R34 и предварительно выставляется (35±10) с.
14) Защита силового трансформатора или реактора от токов короткого замыкания.
Расчет время-токовой защиты:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.