




Тема 11. Регуляторы координат в электроприводе
Важной функцией современных систем управления АЭП является регулирование его координат, т. е. поддержание с необходимой точностью требуемых значений тока, момента, ускорения, скорости. Основным элементом позволяющим выполнить указанную функцию, является регулятор.
регулятор – это устройство, осуществляющее преобразование управляющего сигнала в соответствии с математической операцией, требуемой по условиям работы системы автоматического управления или регулирования. К типовым видам преобразования относятся: пропорциональное – П; пропорционально-интегральное – ПИ, пропорционально-интегро-дифференциальное – ПИД и ряд других.
Основу аналогового регулятора составляет операционный усилитель (ОУ) – усилитель постоянного тока с высоким коэффициентом усиления в разомкнутом состоянии. Наибольшее применение находят операционные усилители интегрального исполнения с корпусом круглой или прямоугольной формы. Операционный усилитель представляет собой многокаскадную структуру, в которой можно выделить входной дифференциальный усилитель ДУ с инвертирующим и прямым входами, усилитель напряжения УН, реализующий высокий коэффициент усиления, и усилитель мощности УМ, обеспечивающий необходимую нагрузочную способность операционного усилителя. Однокристальное малогабаритное исполнение операционного усилителя обусловливает высокую стабильность параметров, что позволяет получить высокий коэффициент усиления на постоянном токе. Интегральные ОУ, применяемые в промышленной электронике, обладают следующими характеристиками:
- дифференциальный коэффициент усиления в
разомкнутом состоянии
kуо= 103¸ 105;
- входное сопротивление Rвх > 100 кОм;
- выходное сопротивление Rвых = 0,2 ¸1 кОм;
- сопротивление нагрузки Rн > 2 кОм;
- полоса пропускания fп < 1 МГц;
- напряжение питания Uп= ±15 В.
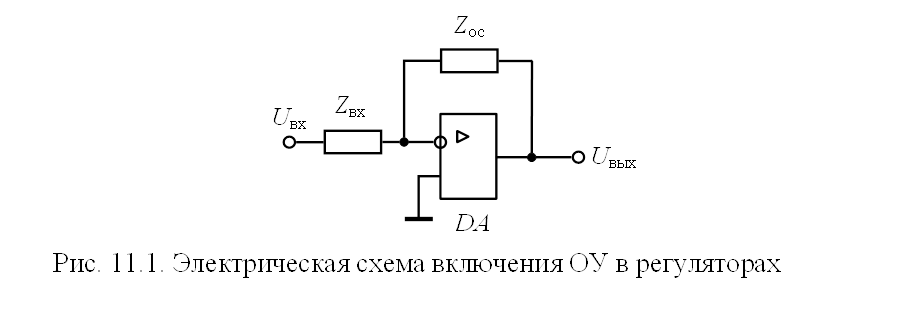
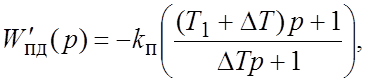
Для построения регуляторов обычно используют схему включения ОУ с инвертирующем входом, представленную на рис.11.1, которая имеет передаточную функцию
 .
.
Используя активные и комплексные сопротивления во входной цепи (Zвх) и в обратной связи (Zос) можно получать регуляторы с различными передаточными функциями.
Рассмотрим схемы, передаточные функции, логарифмические частотные характеристики (ЛАЧХ) и фазочастотные характеристики (ФЧХ) типовых регуляторов.
 |
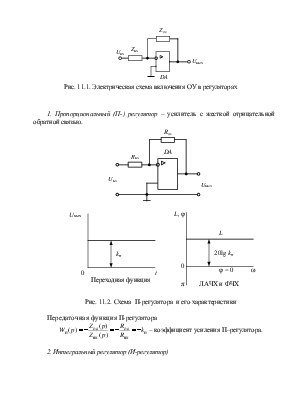
1. Пропорциональный (П-) регулятор – усилитель с жесткой отрицательной обратной связью.
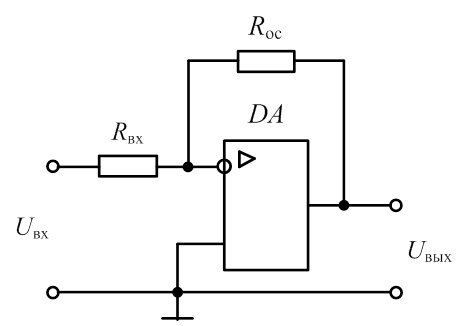
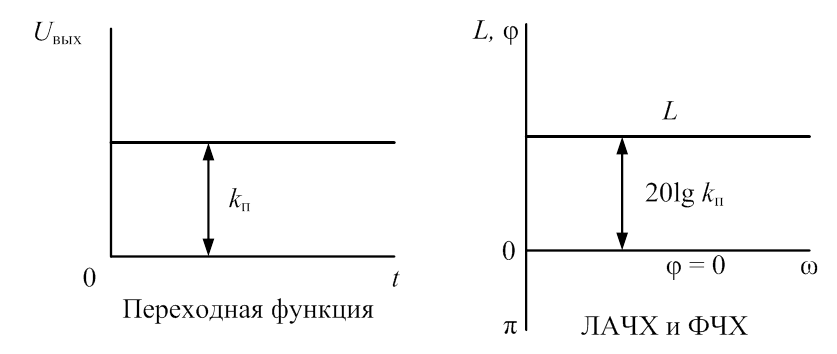
Рис. 11.2. Схема П-регулятора и его характеристики
передаточная функция П-регулятора
 – коэффициент усиления П–регулятора.
– коэффициент усиления П–регулятора.
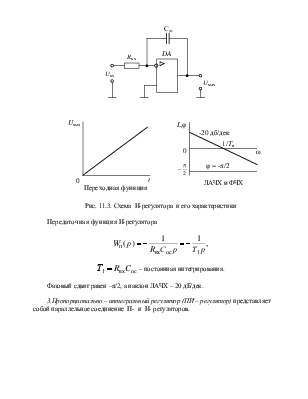
2. Интегральный регулятор (И-регулятор)
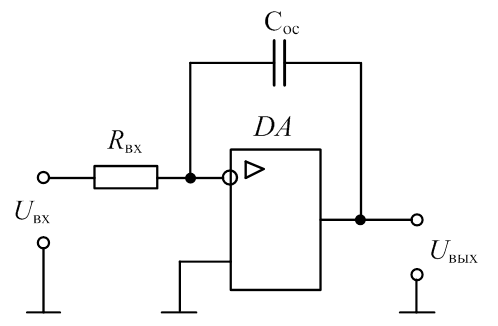
Рис. 11.3. Схема И-регулятора и его характеристики
передаточная функция И-регулятора
![]() – постоянная интегрирования.
– постоянная интегрирования.
Фазовый сдвиг равен –π/2, а наклон ЛАЧХ – 20 дБ/дек.
3.Пропорционально – интегральный регулятор (ПИ – регулятор) представляет собой параллельное соединение П- и И- регуляторов.
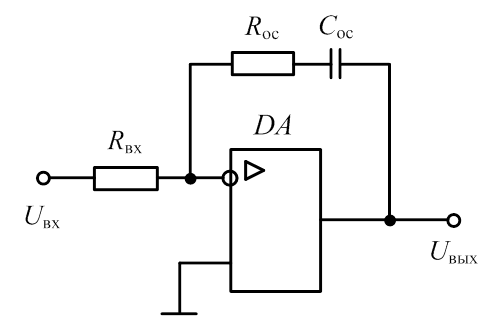
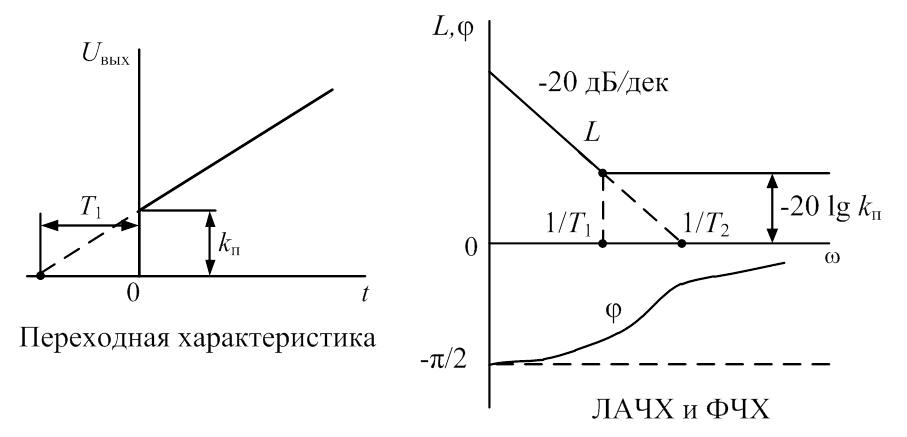
Рис. 11.4. Схема ПИ-регулятора и его характеристики
передаточная функция ПИ-регулятора

где 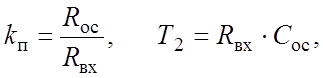
![]()
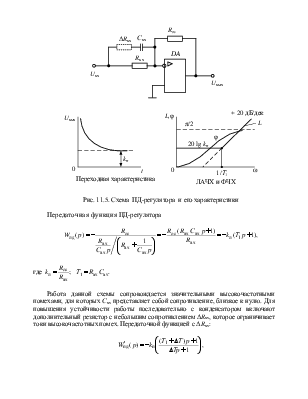
4. Пропорционально-дифференцирующий регулятор (ПД - регулятор).
Объединяет функции П- и Д- регуляторов. Получают параллельным подключением Свх к входному резистору Rвх
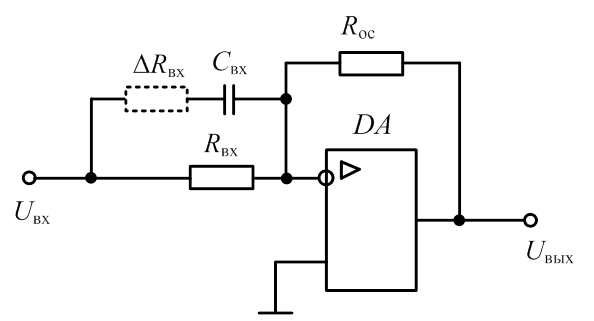
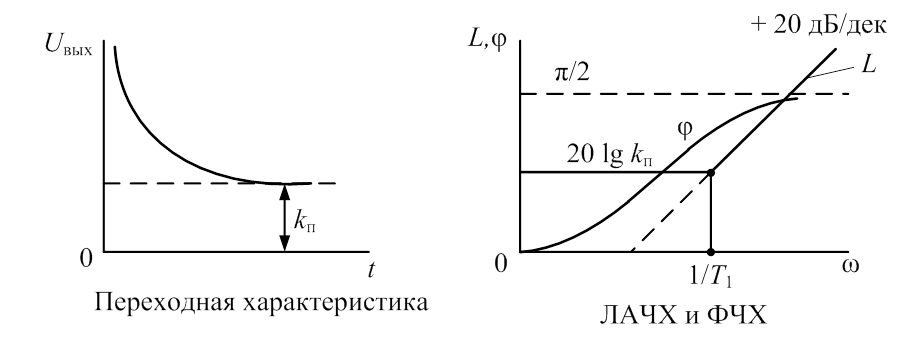
Рис. 11.5. Схема ПД-регулятора и его характеристики
передаточная функция ПД-регулятора

где 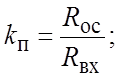
![]()
Работа данной схемы сопровождается значительными высокочастотными помехами, для которых Свх представляет собой сопротивление, близкое к нулю. Для повышения устойчивости работы последовательно с конденсатором включают дополнительный резистор с небольшим сопротивлением ΔRвх, которое ограничивает токи высокочастотных помех. Передаточной функцией с ΔRвх:
где ΔТ=ΔRвх Свх, при ΔТ << Т1 частотная характеристика практически не отличается от характеристики без ΔRвх.
5. Апериодический регулятор (инерционный первого порядка).
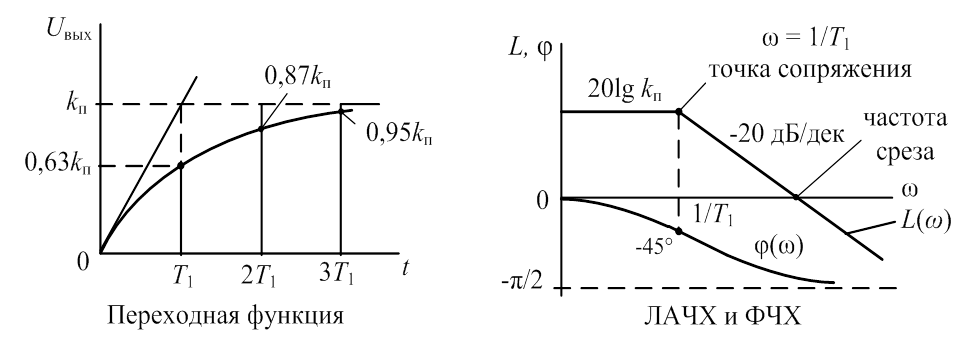
Рис. 11.6. Схема А-регулятора и его характеристики
передаточная функция А-регулятора

![]() –
постоянная времени апериодического звена.
–
постоянная времени апериодического звена.
Аналогичную передаточную функцию имеет схема (рис. 11.7).

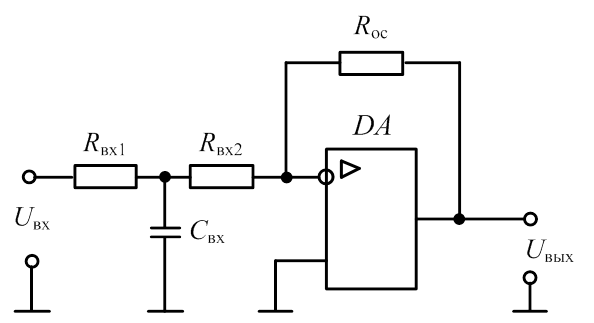
Рис. 11.7. Схема А-регулятора (II вариант)
6. Пропорционально интегрально-дифференцирующий регулятор (ПИД). Выполняет функции одновременно трёх регуляторов.
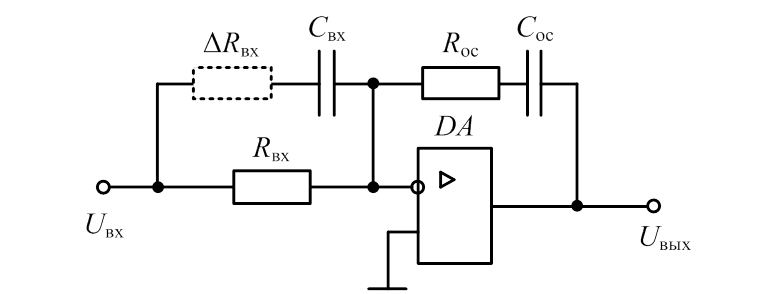
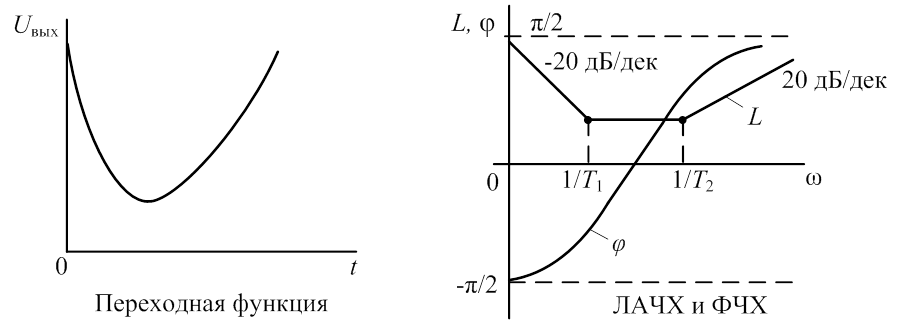
Рис. 11.8. Схема ПИД- регулятора и его характеристики
передаточная функция ПИД-регулятора



где ![]()
![]()
![]()
Для снижения уровня помех на выходе регулятора и повышения устойчивости его работы последовательно с конденсатором Свх может быть включен резистор с небольшим сопротивлением ΔRвх (как для ПД регулятора).
Большими функциональными возможностями, по сравнению со стандартной схемой, имеет схема регулятора с функциональным потенциометром Z1, Z2. Для ослабления влияния помех на входе конденсаторы не используются, а включаются только активное сопротивление Rвх.
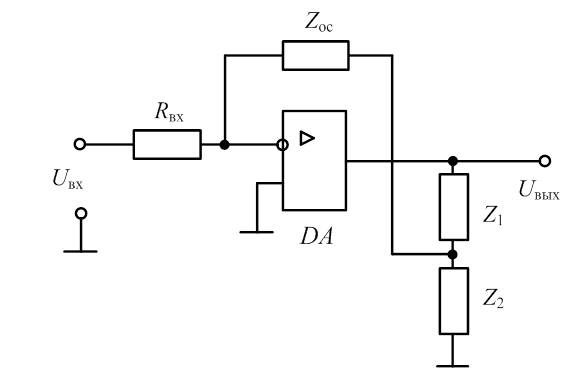
Рис. 11.9. Схема регулятора с функциональным потенциометром
Передаточная функция такого регулятора
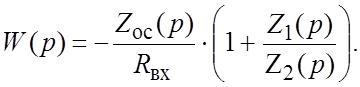
Для уменьшения
искажений, необходимо чтобы в полосе пропускания регулятора выполнялось условие
![]()
Передаточную функцию ПД – регулятора можно получить, если принять
![]()
![]()
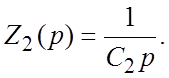
Тогда

Для ПИД – регулятора 
![]()

Если ![]() ,
,
![]() то
получим передаточную функцию ПИ – регулятора.
то
получим передаточную функцию ПИ – регулятора.

Если в схеме принять
![]()

то получим передаточную функцию (ПИ)2 – регулятора

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.