1.
ООС по току и скорости стабилизируют выходные величины, т.е. отрицательная обратная связь "держит" выходной параметр неизменным
ПОС не могут использоваться, потому что они приводят к разносу системы, т.к. постоянно увеличивают выходную величину. Т.е. положительная обратная связь "разгоняет" изменение выходного параметра.
2.
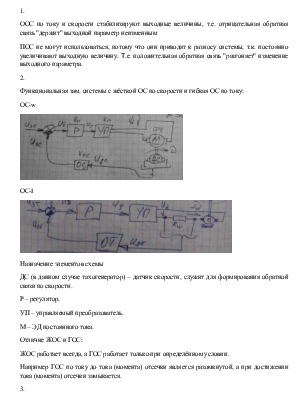
Функциональная зам. системы с жёсткой ОС по скорости и гибкая ОС по току:
ОС-w
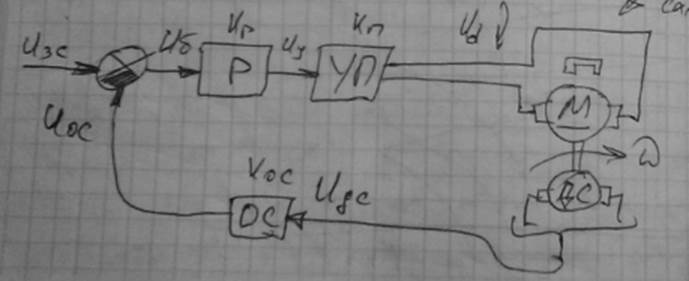
ОС-I
Назначение элементов схемы
ДС (в данном случае тахогенератор) – датчик скорости, служит для формирования обратной связи по скорости.
Р – регулятор.
УП – управляемый преобразователь.
М – ЭД постоянного тока.
Отличие ЖОС и ГОС:
ЖОС работает всегда, а ГОС работает только при определённом условии.
Например ГОС по току до тока (момента) отсечки является разомкнутой, а при достижении тока (момента) отсечки замыкается.
3.
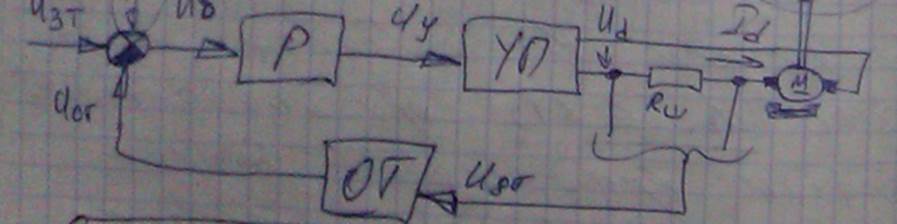
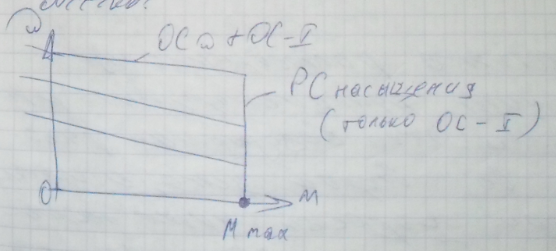
Ур-ие мех. Хар-ки ЖОС:
Система
Ур-е
В итоге

При введении ЖОС-w, жёсткость увеличится,а статизм уменьшится.
4.
Ур-е ГОС-I
В итоге
При введении ГОС-I жёсткоть уменьшается,после Мотс(Iотс),а статизм увеличивается.
5.
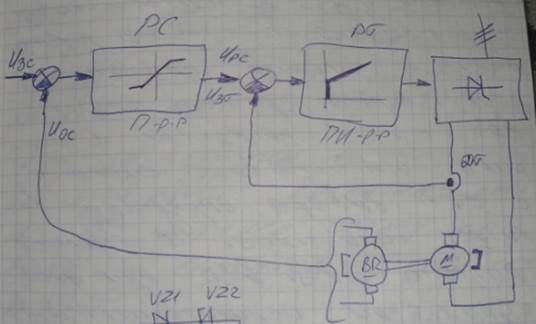
Назначение элементов схемы
Тахогенератор – датчик скорости, служит для формирования обратной связи по скорости.
РС,РТ – регулятор скорости и тока.
УП – управляемый преобразователь.
М – ЭД постоянного тока.
Ограничение тока производится за счёт РС., т.е. из-за рассогласования сигналов задания и сигнала ОС-w,РС уходит в насыщение, тем самым ограничивая сигнал задания тока.
6.
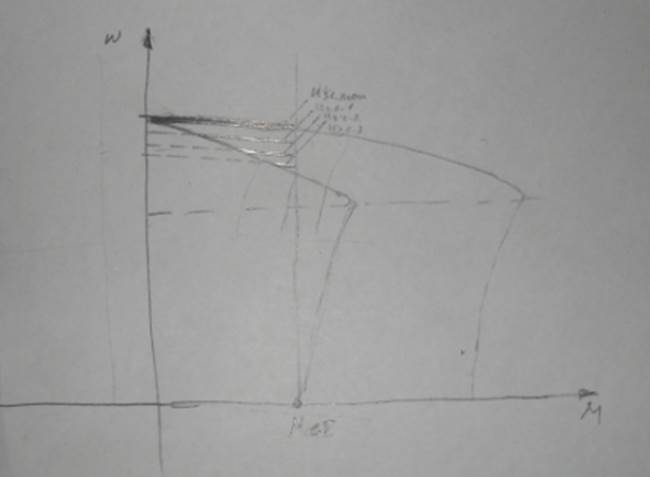
Семейство мех хар-к
Пер-е хар-ки
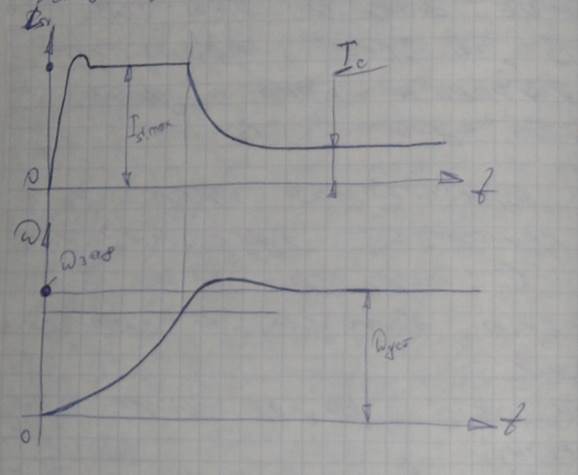
На 1,ток огран-ся за счёт ухода РС в насыщение.
На 2, уменьшается время разгона за счёт ограничения по току.
Ток якоря может превышать ток уставки, за счёт перерегулирования, которое может возникать при настройке на ТО,СО,УСО.
7.
Принцип работы:
При работе Эд во второй зоне, а именно при скоростях ниже номинальной,рег-р ЭДС находится в режиме насыщения и формирует на выходе сигнал задания тока,соответ-ий номинальному току возбуждения. Контур рег-ия Iв служит для стабилизации Iв, при разгоне выше номинальной скорости регулятор ЭДС выходит из ограничения и снижает сигнал задания Iв.
Режим работы рег-ра ЭДС – нелинейный.
8.
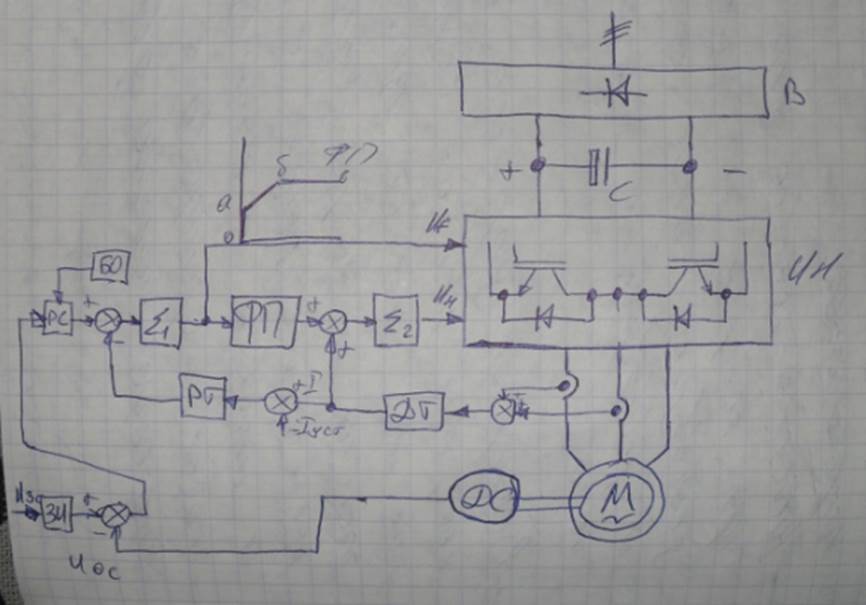
Инвертор работает в режиме ШИМ и преобразует пост. напр. на выходе звена пост. тока в регулируемое по частоте и амплитуде напр. на статоре движка М. Схема явл. нереверсивной, не предусматривает эл.торможение. Рег-р скорости РС вместе с задатчиком интенсивности ЗИ и 1-ым сумматором обеспечивают получение нужной жесткости хар-к во всем D и обеспечения необходимой плавности разгона. Это осущ-ся за счет рег-ия Uf.
ФП – изм-ет величину напряжения в зависимости от частоты.
Стабилизация скорости - если ток статора меньше тока уставки и контур тока разомкнут.
Ограничение Iстат – при привышении током статора тока уставки.
Рекуперация невозможна в этой схеме из-за выпрямителя на входе.
9.
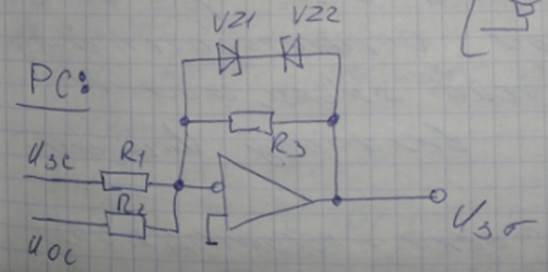
БО РС – ограничивает ток при пуске, путём ограничения сигнала задания тока.
ФП – изменяет величину напряжения в зависимости от величины частоты.
(о-а – напряжение = 0,для компенсации активного сопротивления статора на низких частотах.;
a-б – поддерживается пропорциональность изменения напряжения;
б-в – напряжение постоянно, т.к. не должно превышать номинального значения. )
Семейство стат мех хар-ик:
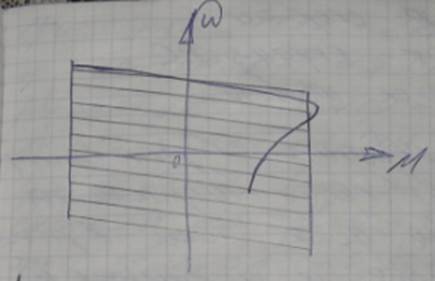
В разомкнутой системе может быть получен D≤10 – 15.
IR-компенсация – для уменьшения влияния активного сопротивления статора на величину магн. потока. ( увеличение напряжения на выходе преобразователя, компенсируя тем самым падение напряжения на активном сопротивлении статора ).
10.
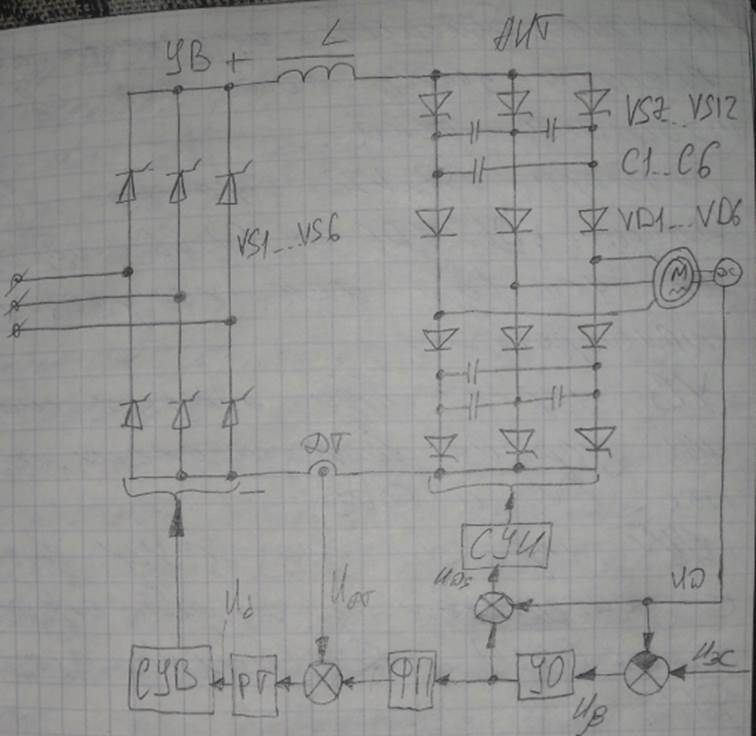
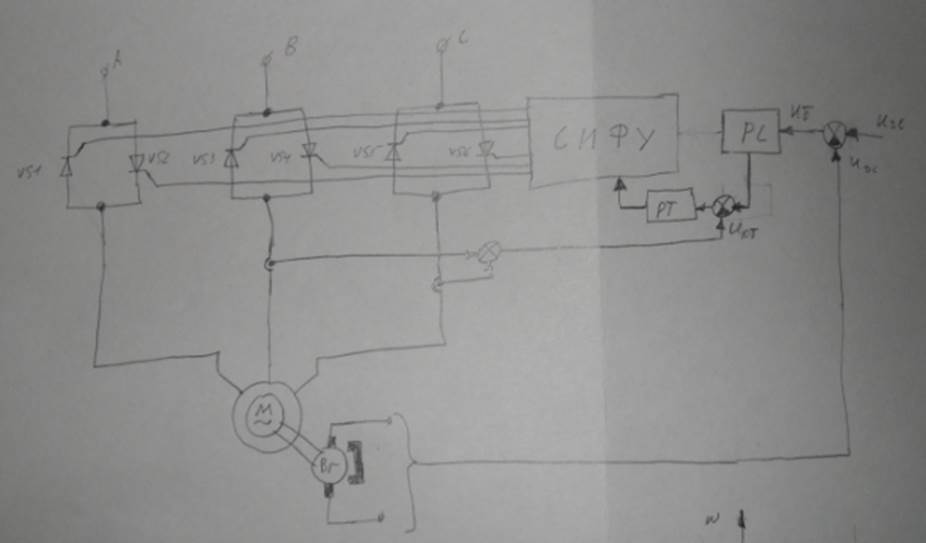
Тиристоры VS1..VS6 – образуют схему управляемого выпрямителя.
Тиристоры VS7..VS12 – образуют автономный инвертор тока.
Диоды VD1..VD6 и конденсаторы C1..C6 – образуют устройство искусственной коммутации.
УВ + L = источник постоянного тока.
СУВ – регулирует выходной ток.
СУИ – регулирует частоту.
УО – усилитель с ограничением. – при резких изм-иях Uзс, он уходит в ограничение, при этом Uβ ост-ся фиксированной, и контур рег-ия тока переходит в режим стабилизации тока.
ФП – преобразует Uβ в сигнал задания тока.
Стабилизация скорости – за счёт ОС-w на линейном участке УО.
Ограничение тока – за счёт ухода в ограничение УО, с пом-ю ОС-I.
Рекуперация энергии возможна, для этого УВ переводится в инверторный режим, а АИТ в выпрямительный.
11.
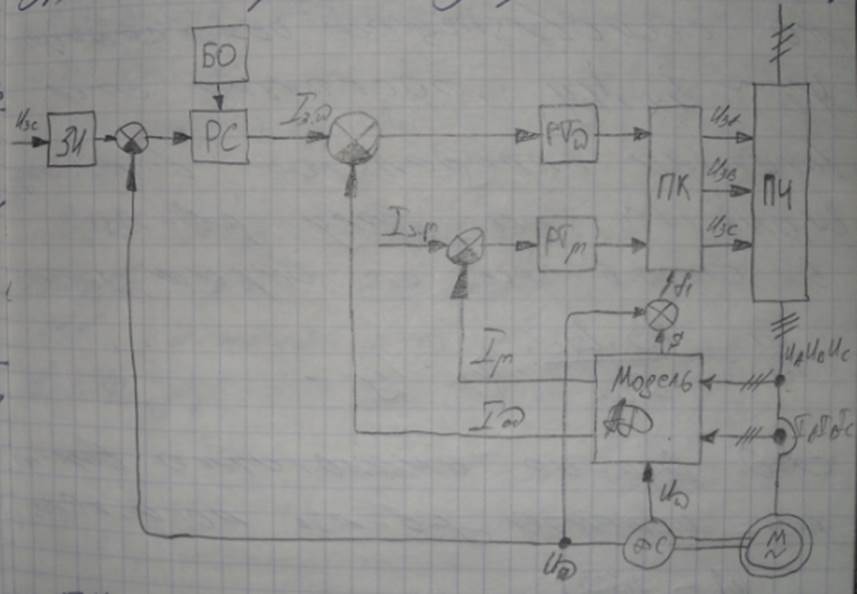
В создании момента участвуют –ψ2 проп-но i1x,i1y,а им пропорциональны Iµ и Iw,
Рег-ие этих переменных производится за счёт вычисления состояния тока статора в 2хф системе координат ХУ, поэтому производят измерения напряжений и токов статора,и при помощи модели АД переходят от 3хф системы к 2хф системы векторов, формируя на выходе моделли сигналы Iw~i1y и Iµ~i1x.
12.
Малый D, не sin-ть напряжения на статоре.
Простота конструкции.
13.
14.
15.
16.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.