Министерство образования и науки Украины
Национальный аэрокосмический университет им. Н. Е. Жуковского
«ХАИ»
Кафедра 301
ХАИ.ЛР.6.051002.338.09
Отчет
по лабораторной работе №5
по курсу “Теория автоматического управления”
на тему: “ Оптимизация параметров системы автоматического управления средствами пакета NCD (Nonlinear Control Desing)”
Выполнила:
студентка 338 группы
Рыбалко С.П.
Проверил:
к.т.н., проф.
Суббота А.М.
ассистент
Копысов О.Э.
2010
Цель работы: Изучение подсистемы динамической оптимизации параметров систем автоматического управления NCD (Nonlinear Control Design); выбор параметров регуляторов; изучение дополнительных библиотек пакета Simulink; исследование влияния пропорциональной, дифференциальной и интегрирующей составляющих ПИД-регулятора на качество системы управления.
Задание: Электромеханическая система, представленная на рисунке 5.1, имеет динамические характеристики, представленные ниже. Выполнить синтез последовательного корректирующего устройства методом ЛАЧХ для обеспечения требуемых показателей качества.
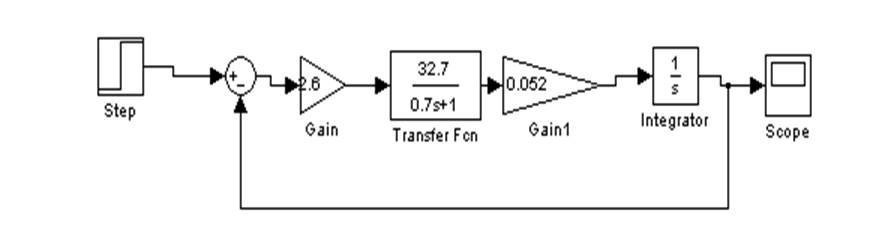
Рисунок 5.1 – Схема моделирования системы управления
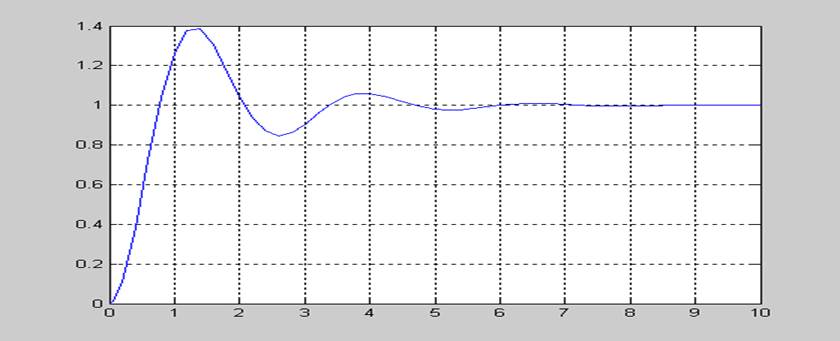
Рисунок 5.2 – График модели САУ
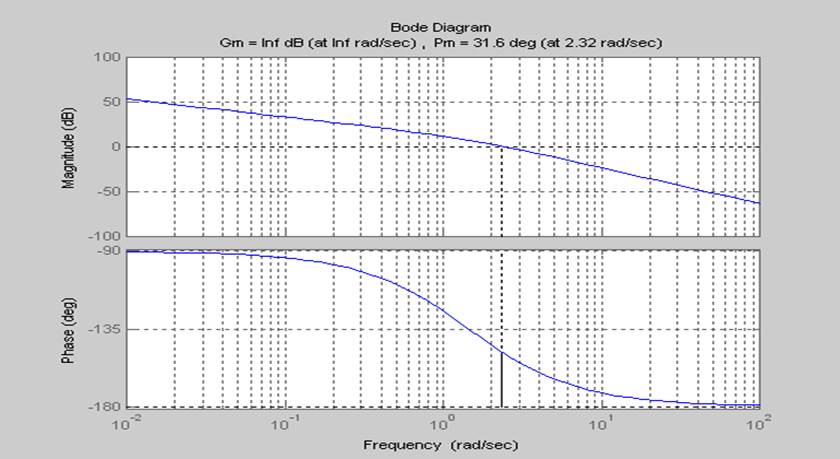
Рисунок 5.3 – График ЛАЧХ САУ
Показатели качества: tnn=3.2; σ=27.6; Lз >10дБ; φз > 60 .
Практическая часть
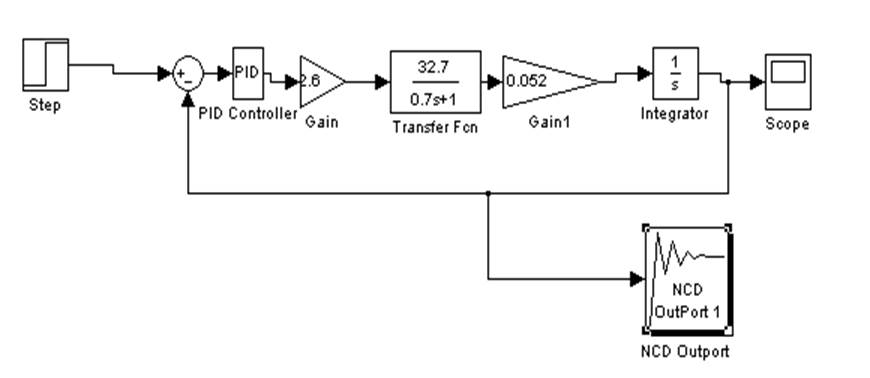
Рисунок 5.4 – Схема моделирования системы управления после ввода блоков PID Controller и NCD Outport.
Таблица 5.1 Тип регулятора
|
П |
ПИ |
ПД |
ПИД |
|
Kp=0,7483 |
Kp=0.8471 Ki=-0.0564 |
Kp=0.9919 Kd=0.0738 |
Kp=0.9925 Ki=-0.0090 Kd=0.0706 |
|
Wраз(s)=kp =0.7483 |
Wраз(s)=kp+ki/s= =0.8471-0.0564/s |
Wраз(s)=kp+kds= =0.9915+0.0738s |
Wраз(s)=kpи+ki/s+kds= =0.9925 -0,0090/s+0,0706 |
|
L =∞ tпп=3.2 σ=27.6 φ=36.2 |
L =∞ tпп=3.2 σ=27.6 φ=36.2 |
L =∞ tпп=3.2 σ=27.6 φ=41.4 |
L =∞ tпп=3.2 σ=27.6 φ=40.8 |
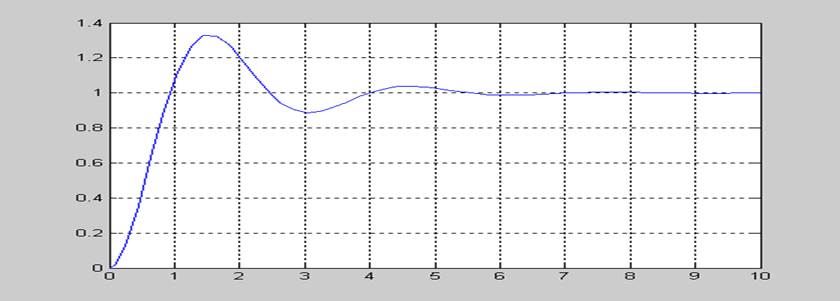
Рисунок 5.5 – График модели САУ при вводе П-регулятора
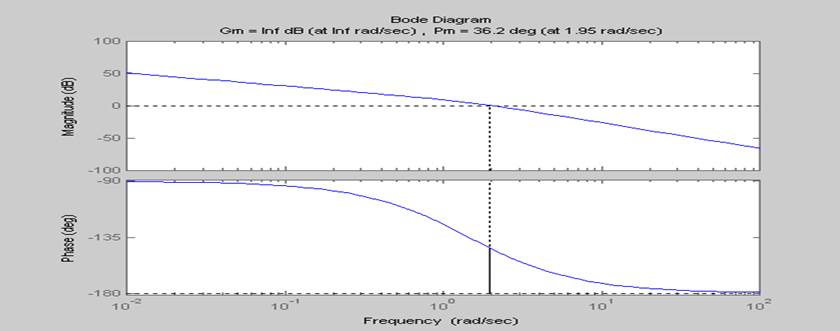
Рисунок 5.6 – График ЛАЧХ САУ при вводе П-регулятора
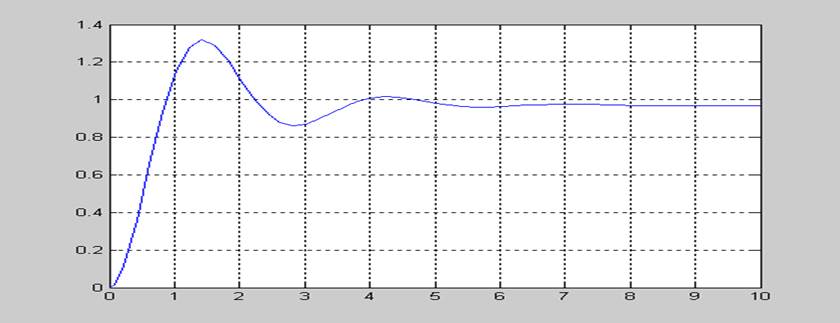
Рисунок 5.7 – График модели САУ при вводе ПИ-регулятора
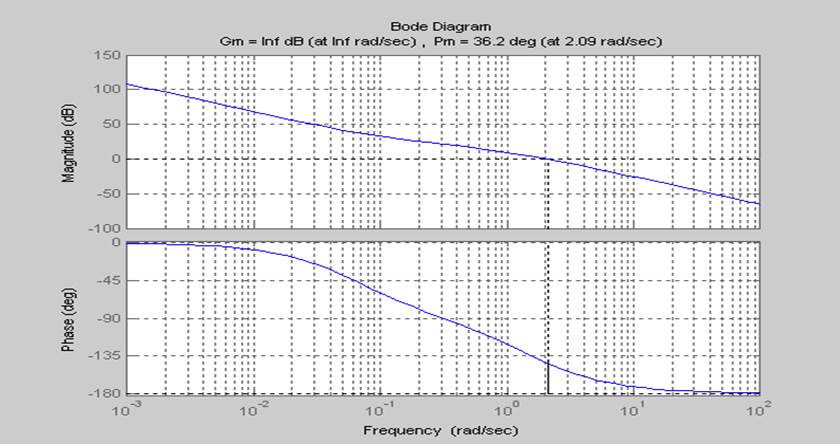
Рисунок 5.8 – График ЛАЧХ САУ при вводе ПИ-регулятора
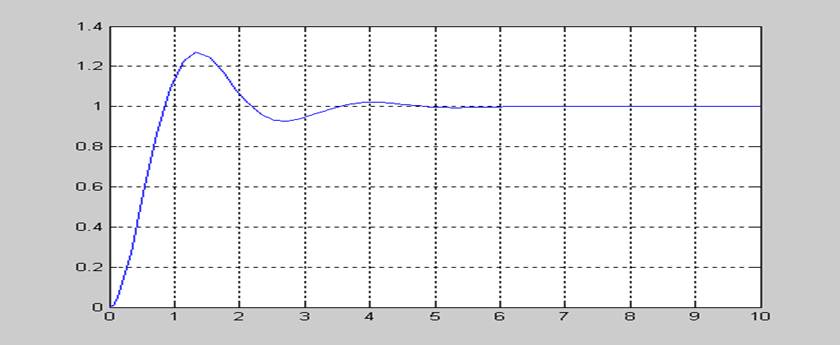
Рисунок 5.9 – График модели САУ при вводе ПД-регулятора
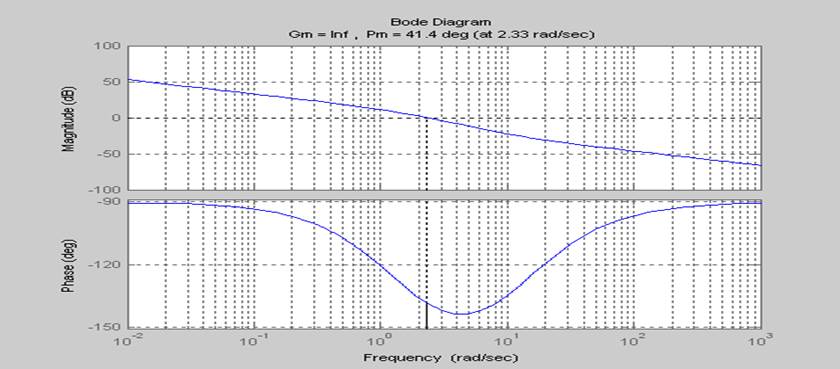
Рисунок 5.10 – График ЛАЧХ САУ при вводе ПД-регулятора
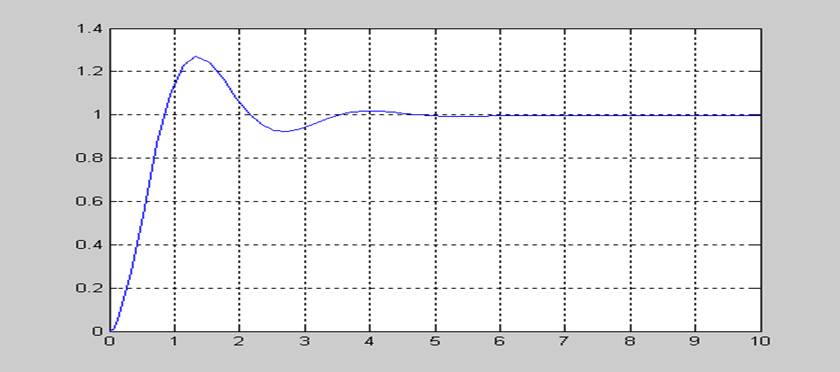
Рисунок 5.11 – График модели САУ при вводе ПИД-регулятора
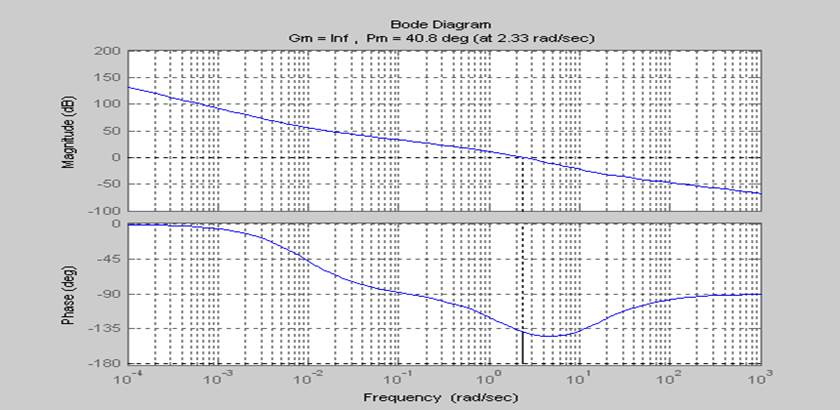
Рисунок 5.12 – График ЛАЧХ САУ при вводе ПД-регулятора
Таблица 5.2 Влияние составляющих П, И, Д
|
Составляющая |
На что влияет |
|
П |
tпп |
|
И |
σ |
|
Д |
L |
Вывод: в ходе данной лабораторной работы я изучила подсистемы динамической оптимизации параметров систем автоматического управления NCD (Nonlinear Control Design), выбрала параметры регуляторов, исследовала влияние пропорциональной, дифференциальной и интегрирующей составляющих ПИД-регулятора на качество системы управления и выявила, что П-регулятор и ПИ-регулятор нельзя подобрать для нашей САУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

