t=-45-+80 0C
Рассчитаем гасящий резистор для питания мультивибратора
R= =1.5
кОм
=1.5
кОм
· Расчет триггера
Т.к. мультивибратор имеет не идеальную характеристику преобразования, поэтому после него ставится триггер, который делит частоту следования импульсов мультивибратора на 2, в итоге получаем сигнал со скважностью равной 2.
Из вышесказанного можно сделать вывод о том, что частота следования меандра будет равна f=2*fм=40*103/2=20 кГц.
В данной работе применяется триггер типа К561ТВ1. Это триггер типа J-K, он имеет прямой и инверсный выходы, выходы установки в состояние высокого уровня S и в состояние низкого уровня R, вход синхронизации С.
Uпит=3-15 В
Iпит=0,14 мА
Iol=0.24 мА
tнс=770 нс
t=-45- =5 0C
Рассчитаем гасящий резистор по Iпит, необходимому для работы триггера:
 =
= =107,14
кОм
=107,14
кОм
По параметрическому ряду[1] для резисторов уточняем номинал резистора R=100 кОм.
· Выбор стабилизатора DAР3300
Этот прецизионный стабилизатор применяется для того чтобы понизить напряжение в 15 В, которое подается с блока питания, до 5 В для дальнейшего преобразования его в электрической схеме.
Стабилизатор типа ADР3300. Имеет следующие характеристики:
Uпит=15 В
Uвых=5 В
Iвых=50 мА
Iпотр=1,7 мА
· Расчет преобразователя напряжения
Данная микросхема AD822AN служит для усиления сигнала в форме меандр со значения 2.5В до± 5В, необходимого для питания мостовой схемы. Коэффициент усиления задается с помощью резисторов, которые находятся между собой в обратной связи, эта величина будет рассчитана позже, номиналы резисторов, задающих коэффициент усиления равны 22 кОм, 18 кОм), т. е. на выходе мы получим двуполярное напряжение.
· Ключевая микросхема
Ключевая микросхема типа КР590КН4 это
ключ на МОП транзисторах с управлением. На ее выходе получается напряжение
формы меандр с заданной частотой (частота работы таймера, делится на 2, т. к.
после него стоит триггер), т.е 20 кГц и амплитудой ![]() 5
В (амплитуда сигнала задается микросхемой AD822AN,
описанной в п. 2.2.2.4. Аналоговый ключ управляется дискретным сигналом (от
мультивибратора), а переключает непрерывный сигнал (от микросхемы AD822AN).
5
В (амплитуда сигнала задается микросхемой AD822AN,
описанной в п. 2.2.2.4. Аналоговый ключ управляется дискретным сигналом (от
мультивибратора), а переключает непрерывный сигнал (от микросхемы AD822AN).
Характеристики:
Сопротивление в открытом состоянии 75 Ом
tоп=0.3 мкс
4 канала
Us=![]() В – коммутируемое напряжение
В – коммутируемое напряжение
Is=20 мА – коммутируемый ток
Uпит=![]() 15 В
15 В
Iпит=20 мА
t=-45-+70 0C
· Усилительный каскад
Усилительный каскад состоит из 2-х частей: операционного усилителя и усилителя мощности. Операционные усилители (АD822АN) – это повторители напряжения, а усилители мощности – это каскад из биполярных транзисторов, которые используются для усиления сигнала по току, т. к. на выходе ключевая микросхема имеет значительное потребление по току, то необходимо усилить ток до необходимого значения, которое рассчитывалось из следующих соображений:
Зная напряжение необходимое мостовой схеме (5 В) и номиналы резисторов, которые стоят в мосту (посчитав общее сопротивление моста с помощью преобразования последовательно-параллельного соединения, получили Rвх=250 Ом), можно посчитать ток:
I= =
= = 0,02 А= 20 мА
= 0,02 А= 20 мА
В каскаде усиления мощности используем следующие типы транзисторов:
КТ315В, КТ361В, КТ815Г, КТ814Г.
3.2 Выбор и расчет блока датчика
В качестве датчика для измерения малых угловых перемещений выбран индуктивный датчик.
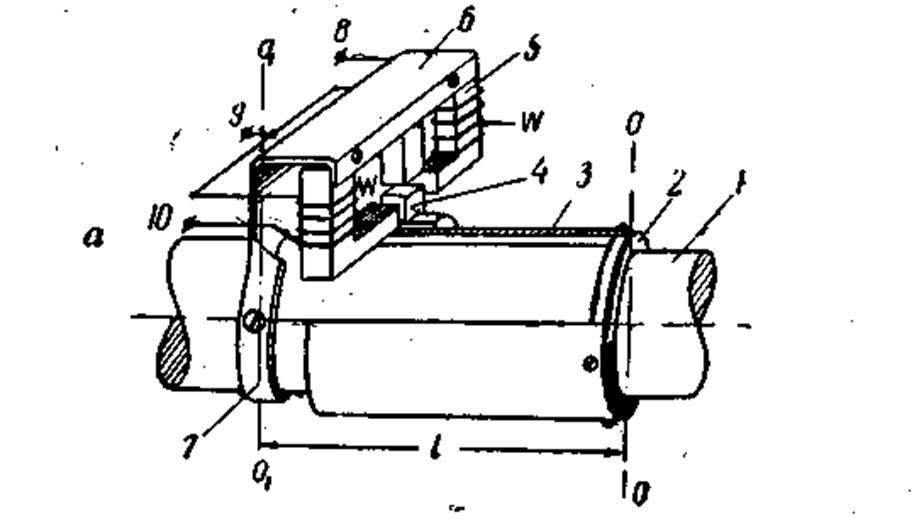
Рис.1
На рис.1 показан индуктивный датчик для определения малого углового перемещения. Также по угловому смещению можно определить вращающий момент вала. Угловое перемещение определяется по смещению двух сечений вала 1 отстоящих друг от друга на расстоянии l=4 см. На валу 1 укрепляется кольцо 2, связанное с трубой 3, на конце которой расположен сердечник 4. Этот сердечник является подвижным элементом двойной индуктивной катушки 5 при помощи скоб 6,7 укрепляется на том же валу 1 в сечении О1-О1, смещенному относительно сечения О-О на расстоянии l.
Угловое смещение сечения О1-О1 относительно сечения О-О приводить к изменению воздушных зазоров между сердечником 4 и магнитопроводом 5, в результате чего изменяется индуктивность катушек, которые включены в мостовую цепь.
Рис.2
На рис.2 изображен индуктивный датчик в виде сдвоенной катушки индуктивности и перемещающегося сердечника.
На подвижный сердечник преобразователя действует тяговое усилие, так как сердечник перемещается в маленьких пределах, то тяговое усилие принимаем равным Fт =0.2г. Материалом для сердечника принимается листовая электротехническая сталь толщиной 0.35 мм марки Э46.
Для расчета катушки необходимо из конструкторских соображений задаться конструктивными параметрами: а = 10 мм; в = 8 мм; с = 3 мм; d = 4 мм; е = 6 мм; f = 3 мм. Магнитопровод изготавливается из феррита, размеры которого выбраны из таблицы 111.17 [ 3] . Марка феррита 2000НМ.
Средняя длина магнитной линии =4 см.
Площадь окна =0.4 см2.
Для обмотки
катушки выбираем провод марки ПЭВВр. ![]() -
средняя длина витка.
-
средняя длина витка.
Рассчитываем диаметр провода обмотки

Выбираем после этого по таблице 2.5 [2] исходные данные для расчета обмоток из провода марки ПЭВ Вр:
d= 0.16 мм -диаметр провода;
d1= 0.19мм –толщина изоляции;
![]() =27.7 –число витков,
приходящихся на 1мм2 сечения окна катушки
=27.7 –число витков,
приходящихся на 1мм2 сечения окна катушки
кз= 0.557 – коэффициент заполнения.
С0= 0.07
Расчет числа витков катушки:
![]() ,
,
Сопротивление обмотки катушки:
 Ом
Ом
Рассчитаем индуктивность катушки:
 мГн
мГн
Так как диаметр провода обмотки равен 0.2 мм, то по табл.4 [1] ток протекающий по этой обмотке равен I=0.2A.
Рассчитываем полное магнитное сопротивление катушки:
 Ом
Ом
Расчет мостовой схемы.
Для получения сигнала от датчика и преобразования его в электрический сигнал используется мостовая схема включения. В соседние плечи моста включаются две обмотки датчика, изменение индуктивности которых зависит от перемещения сердечника.
Мостовой метод является основным, наиболее совершенным методом измерения параметров электрических цепей и составляет один из вариантов метода уравновешивающего преобразования. Измерительные мосты переменного тока предназначены для измерений комплексных сопротивлений[5].
Условие равновесие моста выполняется при выполнении условия:
 =0,
=0,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.