5 РАСЧЕТ АППАРАТУРЫ ДИСТАНЦИОННОГО КОНТРОЛЯ НЕРАВНОМЕРНОСТИ ЗАГРУЗКИ ( ДИСК2 - З )
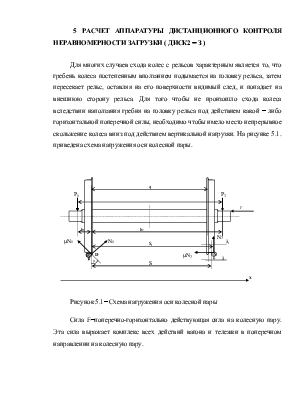
Для многих случаев схода колес с рельсов характерным является то, что гребень колеса постепенным вползанием подымается на головку рельса, затем пересекает рельс, оставляя на его поверхности видимый след, и попадает на внешнюю сторону рельса. Для того чтобы не произошло схода колеса вследствии наползания гребня на головку рельса под действием какой - либо горизонтальной поперечной силы, необходимо чтобы имело место непрерывное скольжение колеса вниз под действием вертикальной нагрузки. На рисунке 5.1. приведена схема нагружения оси колесной пары.
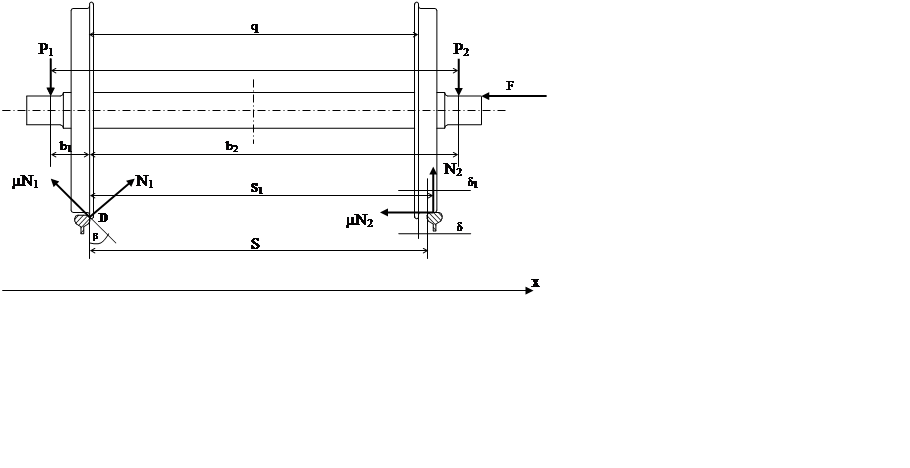
Сила F-поперечно-горизонтально действующая сила на колесную пару. Эта сила выражает комплекс всех действий вагона и тележки в поперечном направлении на колесную пару.
Силы P1 и P2 - вертикальные силы, приложенные в серединах шеек оси. Эти силы вследствие вертикальных колебаний и боковой качки вагонов являются величинами переменными. Будем полагать, что каждая из этих сил включает также половину веса самой колесной пары. Расстояние s согласно /7/ равно 1524 мм. Расстояние q согласно /7/ равно 1440 мм.
Допустим что колесо начало вползать на головку рельса. Тогда колесная пара займет между осями положение, показанное на рисунке 5.1. Если гребень одного колеса будет прижат к рельсу, то между гребнем другого колеса и рельсом будет образован зазор d.
Чтобы возможно было непрерывное скольжение левого колеса вниз по наклонной плоскости и одновременное поперечное скольжение правого колеса вправо, необходимо выполнение условия:
N1 sinb > mN1cosb + F + mN2 (5.1)
N1 (sinb - mcosb) > F + mN2 (5.2)
Это неравенство получено проектированием на ось X всех действующих на колесную пару сил. Проектируя силы на ось Y-ов будем иметь:
- P1 - P2 + N2 + N1 cosb + mN1 sinb = 0 (5.3)
Сумма моментов сил относительно точки касания левого колеса с рельсом
- F (R + r) – N2 S1 + P2 b2 -P1 b1 = 0 (5.4)
где : R - радиус колеса;
r - радиус шейки оси;
s1 b1 b2 - соответственно плечи сил N2 , P1 и P2 относительно центра моментов D.
Решая неравенства (5.3), (5.4) относительно N1 и N2 и подставляя их в (5.2), учитывая что m = tg j, где j - угол трения то
tg ( b-j ) [ P1 (s1 +b1) + P2 (s1 -b1) + F (R + r)] >
F s1 +m [ P2 b2 - P1 b1 -F (R +r )] (5.5)
где b - угол наклона гребня;
или
 (5.6)
(5.6)
или
 (5.7)
(5.7)
В нашем случае согласно /7/ для стальных колес R = 475 мм. , r = 75 мм.,
b1 = 264 мм., b2 =1772 мм., d1 = 26 мм., b =60 0 .
s1 = s + d1 (5.8)
По расчету
s1 = 1524 + 26 =1550 мм.
Подставляя численные значения букв, входящих в формулу (5.7) и давая коэфициенту трения m различные значения получим выражение (5.9)
При m = 0,15  (5.9)
(5.9)
m = 0,20 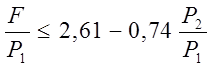
m = 0,25 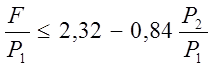
m = 0,30 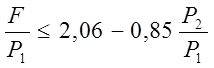
В таблице 5.1 приведены значения отношения F/ P при P1 = P2.
Таблица 5.1 - Результаты расчета при P1 = P2
|
Значение коэфициента трения скольжения |
Результат по формуле (8 ) |
|
0,15 |
2,30 |
|
0,20 |
1,87 |
|
0,25 |
1,48 |
|
0,30 |
1,21 |
В действительности критическое значение отношения F/P как видно из формулы (8), зависит не только от значения коэфициента трения m и угла наклона b, но еще в большей степени зависит от величины отношения вертикальных нагрузок P1 и P2 , приложенных к шейкам оси колесной пары.
Вследствие неравномерного размещения груза в вагоне при погрузке или при перемещение груза во время движения вагона, при боковой качке, отношение P1 / P2 не всегда равны еденицы.
При этом наиболее опасным для схода колес является тот случай, когда это отношение имеет наибольшее значение, так как при этом получается максимальное разгружение набегающего колеса. Чем это отношение будет больше, то есть чем больше будет разгружение наползающего колеса, тем при меньшем значение поперечной силы F возможен сход вагона.
Согласно опыту зарубежных стран различие вертикальных нагрузок не должно быть более 20 % , то есть отношение этих нагрузок не должно быть больше 1,2.
Для выявления вагонов склонных к сходу из-за неравномерности загрузки вагона или вследствии смещения и уплотнения груза в процессе перевозки разработана система ДИСК2-З.
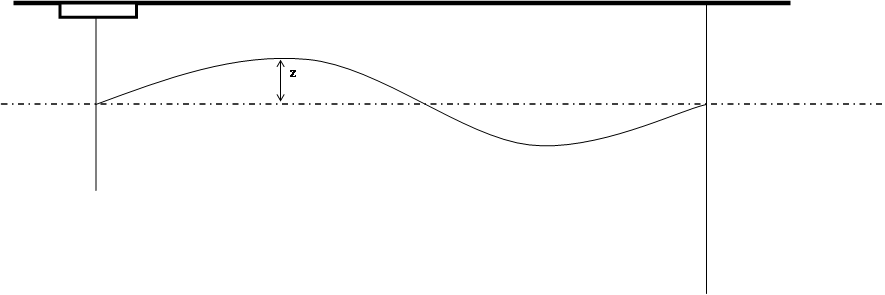
Колесная пара при движение по рельсовому пути совершает извилистое
движение, как показано на рисунке 5.2
 |
![]()
![]()
![]()
 |
L - длина волна извилистого движения ;
Z - смещение колесной пары - амплитуда
Рисунок 5.2 - Схема движения колесной пары
 (9)
(9)
где: r - радиус колеса;
s - расстояние между кругами катания колес;
i - конусность.
Согласно /7/ s = 1,555м., для новых колес i = 1,2 , для изношенного колеса i = 1,4.
По расчету для нового колеса
 м.
м.
По расчету для изношенного колеса

Изношенное колесо имеет большую длину извилистого движения поэтому датчики для измерения нагрузки передаваемой с шейки оси на колесо, а затем на рельс, размещаем на этой половине длины волны через каждые 2 метра. На расстоянии 17 метров устанавливаются 8 датчиков на каждую рельсу, которые крепятся к шейке рельса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.