А N
 SB2
SB2
SB1.1 KM1
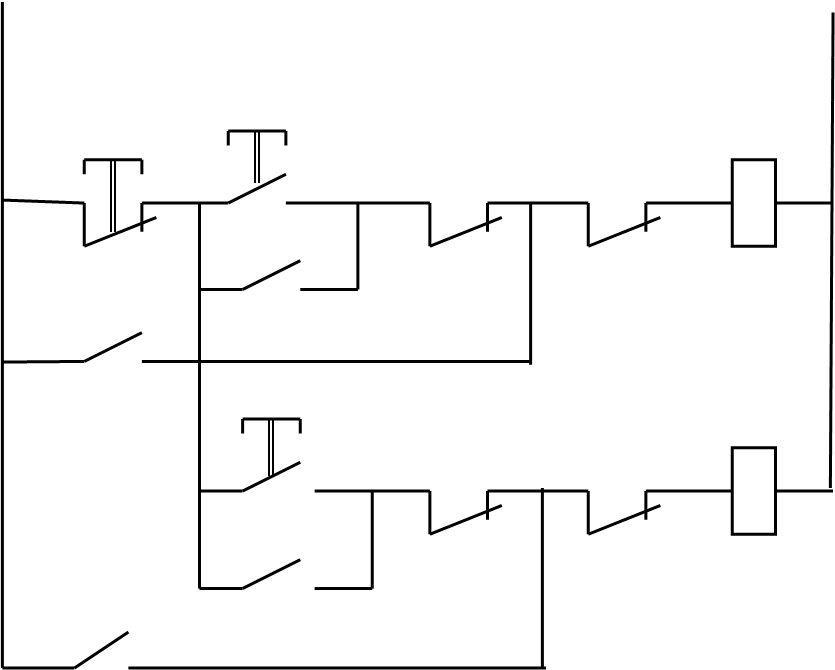
SR1.2 KM2.2 KM1.1 SR1.1 SB3 KM2 SR1.4 KM1.2 KM2.1 SR1.3
Рисунок
7.15 - Схема управления реверсивным электроприводом с
возможностью осуществления торможения противо-
включением в функции скорости
Силовая часть схемы управления для схемы, приведённой на рисунке 7.15, аналогична схеме, приведённой на рисунке 7.14.
Аналогично работает и другая часть схемы, когда электропривод управляется в двигательном режиме при помощи контактора КМ2. В этом случае процесс торможения двигателя обеспечивается работой контактов SR1.1 и SR1.2 в цепи питания электромагнита управления контактора КМ1.
Реле контроля скорости устроено таким образом, что при вращении в одну сторону, срабатывает одна пара контактов, например, в рассмотренной схеме это контакты SR1.1 и SR1.2, а при вращении в другую сторону срабатывают контакты SR1.3 и SR1.4.
7.1.5 Схемы комбинированного управления электроприводами
В промышленности очень часто применяются электропривода, работающие в функции двух и более технологических величин или параметров (такими величинами и параметрами являются, например: скорость, время, положение в пространстве, ток статора (ротора), напряжение, мощность, момент).
Схемы управления электроприводами в функции нескольких величин называются комбинированными схемами управления.
Схема управления (рисунок 7.16) позволяет осуществлять управление электроприводом в функции двух величин – пути и времени.
После пуска двигателя кнопкой SB2 двигатель перемещает рабочий орган производственного агрегата. При достижении крайней точки траектории движения двигатель будет остановлен при помощи конечного выключателя SQ1. Контакт SQ1.1 отключит контактор КМ1. Контакт SQ1.2 включит электромагнит управления реле времени КТ1, которое, благодаря блок-контакту КТ1.1, установится на самопитание. Контакт КТ1.2, имеющий выдержку времени при срабатывании, включит электромагнит управления контактор КМ2 через промежуток времени, равный уставке реле времени и двигатель включится на ход «назад».
Достигнув исходного положения, двигатель в крайней точке отключается конечным выключателем SQ2. Контакт SQ2.1 отключает контактор КМ2. Контакт SQ2.2 включит электромагнит управления реле времени КТ2, которое, благодаря блок-контакту КТ2.1, установится на самопитание. Контакт КТ2.2, имеющий выдержку времени при срабатывании, включит электромагнит управления контактор КМ1 через промежуток времени, равный уставке реле времени и двигатель включится на ход «вперёд».
Для того чтобы предотвратить одновременное включение контакторов КМ1 и КМ2, в схеме управления реализована блокировка «исключения» с использованием контактов КМ1.2 и КМ2.2. в цепях управления электромагнитов управления контакторов КМ2 и КМ1 и контактов КМ1.3 и КМ2.3 в цепях управления электромагнитов управления реле времени КТ1 и КТ2.
Схема управления (рисунок 7.17) позволяет осуществить управление электроприводом по циклу: ход «вперёд», реверс в функции пути, ход «назад» и автоматический останов в исходном положении с торможением противовключением в функции скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.