При модернизации системы управления необходимо устранить недостатки работы существующей системы управления в рабочем, аварийном режимах и в режиме пуск-останов. После модернизации система управления должна обеспечивать управление процессом в автоматическом и в ручном режимах, сигнализацию о выходе из строя какого-либо оборудования, параметров объектов регулирования и полную наглядность хода всего технологического процесса.
Управление процессом должно быть обеспечено как в ручном, так и в автоматическом режиме с ЭВМ оператора-технолога, и передача необходимых данных в диспетчерскую, а также прием с диспетчерской данных.
Модернизация должна быть проведена с использованием современных зарубежных и отечественных средств автоматизации: контроллеров, датчиков, преобразователей, исполнительных устройств.
6 Техническое задание на модернизацию системы управления.
При модернизации системы управления необходимо устранить недостатки работы существующей системы управления в рабочем, аварийном режимах и в режиме пуск-останов. После модернизации система управления должна обеспечивать управление процессом в автоматическом и в ручном режимах, сигнализацию о выходе из строя какого-либо оборудования, параметров объектов регулирования и полную наглядность хода всего технологического процесса.
Управление процессом должно быть обеспечено как в ручном, так и в автоматическом режиме с ЭВМ оператора-технолога, и передача необходимых данных в диспетчерскую, а также прием с диспетчерской данных.
Модернизация должна быть проведена с использованием современных зарубежных и отечественных средств автоматизации: контроллеров, датчиков, преобразователей, исполнительных устройств.
Данные для расчета:
Коэффициенты усиления К1=13
К2=18,5
Постоянные времени: Т=16
Т1=4.9
Т2=24
Время запаздывания: t1=3,61; t2=7,22
Передаточные функции: 
Подставляя данные в передаточные функции, получим:
и
Составим модели для основного и вспомогательного регулятора. И определим С1крит для основного и вспомогательного регулятора (с помощью линейного анализа пакета MatLab 6.5)
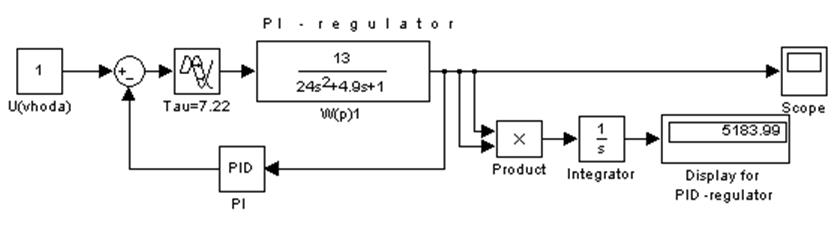
Рисунок 7.1 – Модель для основного регулятора в среде Simulink.
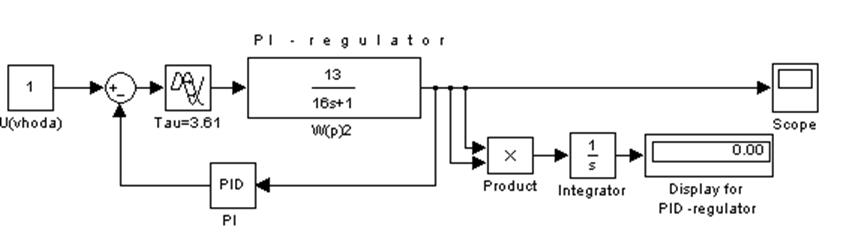
Рисунок 7.2 – Модель для вспомогательного регулятора в среде Simulink
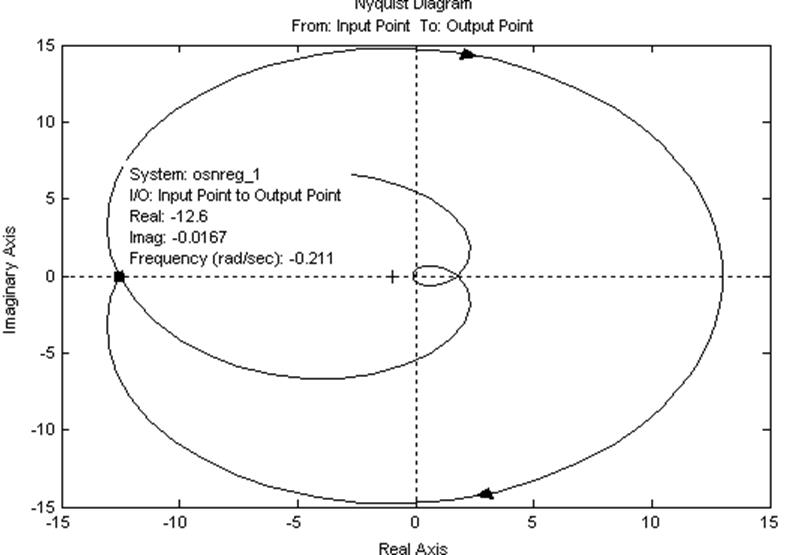
Рисунок 7.3 - АФЧХ для определения параметров основного регулятора
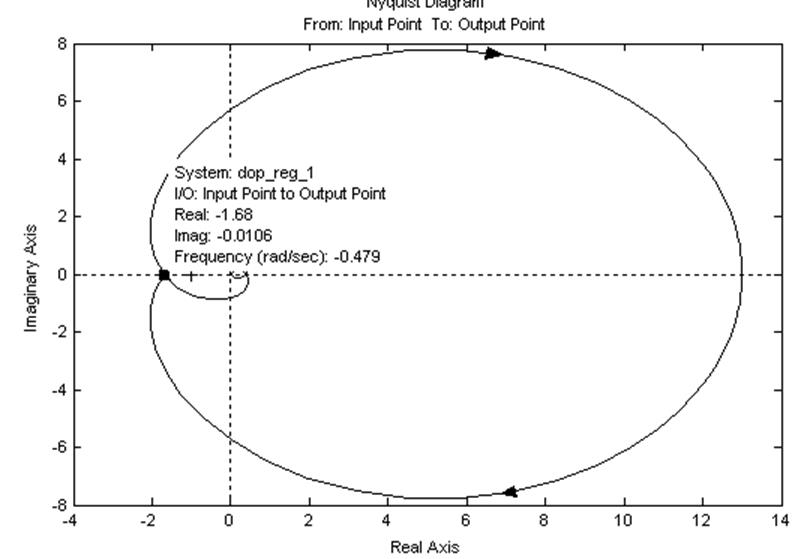
Рисунок 7.4 - АФЧХ для определения параметров вспомогательного регулятора
Определим настройки для основного ПИ-регулятора
Критическая частота, действительная часть и граница устойчивости для основного регулятора будут равны (рисунок 7.3):
Параметры настройки определим следующим способом:

Определим настройки для дополнительного П-регулятора.
Критическая частота, действительная часть и граница устойчивости для основного регулятора будут равны (рисунок 7.4):
![]()
Параметры настройки определим следующим способом:
Данные расчета каскадной АСР сведем в таблицу:
Таблица 7.1 - Параметры регуляторов каскадной АСР
|
Тип регулятора |
|
|
С1 |
С0 |
|
ПИ |
0,21 |
0,595 |
0,039 |
0,0068 |
|
П |
0,479 |
0,079 |
0,2976 |
---------- |
Теперь, реализуем нашу АСР в среде Simulink (MatLab 6.5):
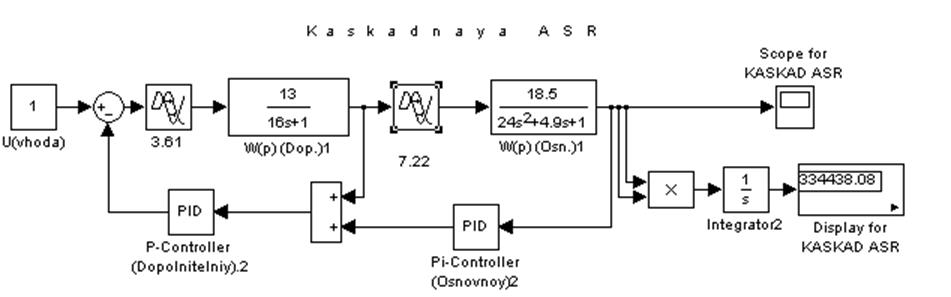
Рисунок 7.5 – Модель каскадной АСР в среде Simulink.
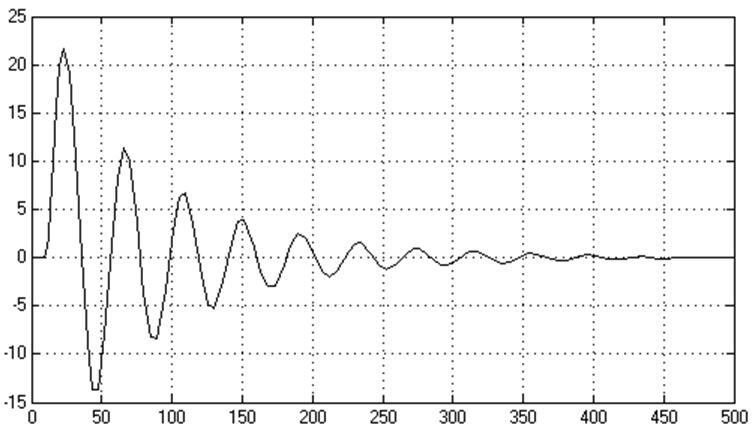
Рисунок 7.6 - Процесс регулирования каскадной АСР.
Перемножив W1 и W2 получим передаточную функцию следующего вида:

Составим модель регулятара. И определим С1крит (с помощью линейного анализа пакета MatLab 6.5)
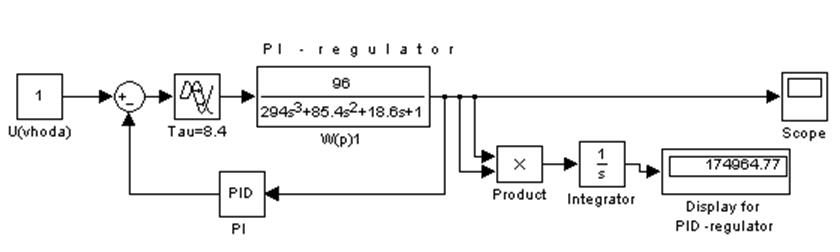 Рисунок 7.7 – Модель ПИ-регулятора в среде
Simulink.
Рисунок 7.7 – Модель ПИ-регулятора в среде
Simulink.
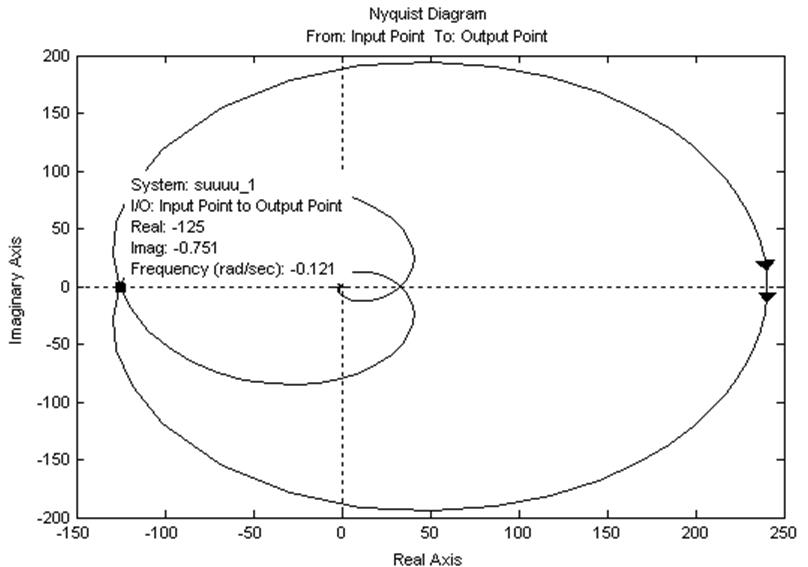
Рисунок 7.8 - АФЧХ для определения параметров регулятора
Определим настройки ПИ-регулятора
Критическая частота, действительная часть и граница устойчивости для основного регулятора будут равны (рисунок 7.3):
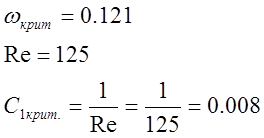
Параметры настройки определим следующим способом:

Сравним:
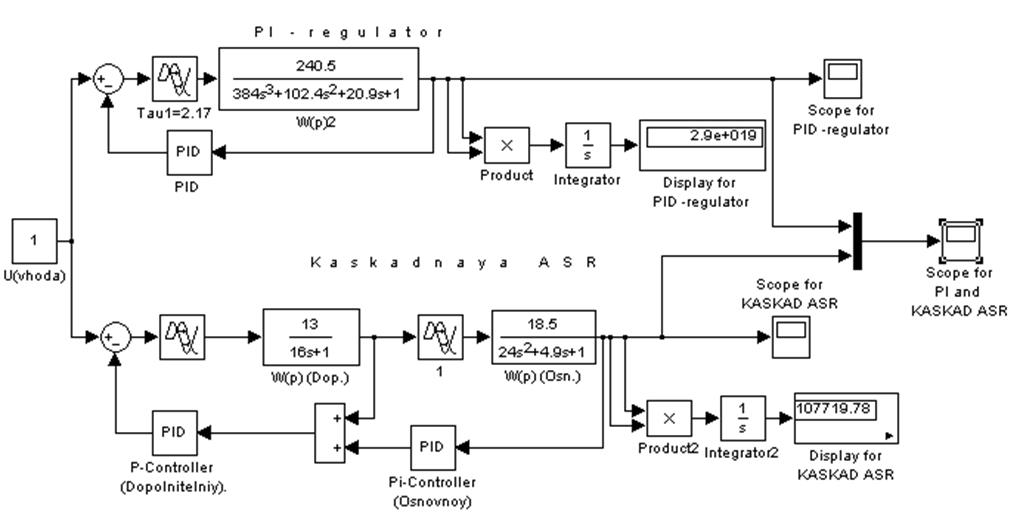 Рисунок 7.9 – Модель ПИ-регулятора и каскадной АСР в
среде Simulink.
Рисунок 7.9 – Модель ПИ-регулятора и каскадной АСР в
среде Simulink.
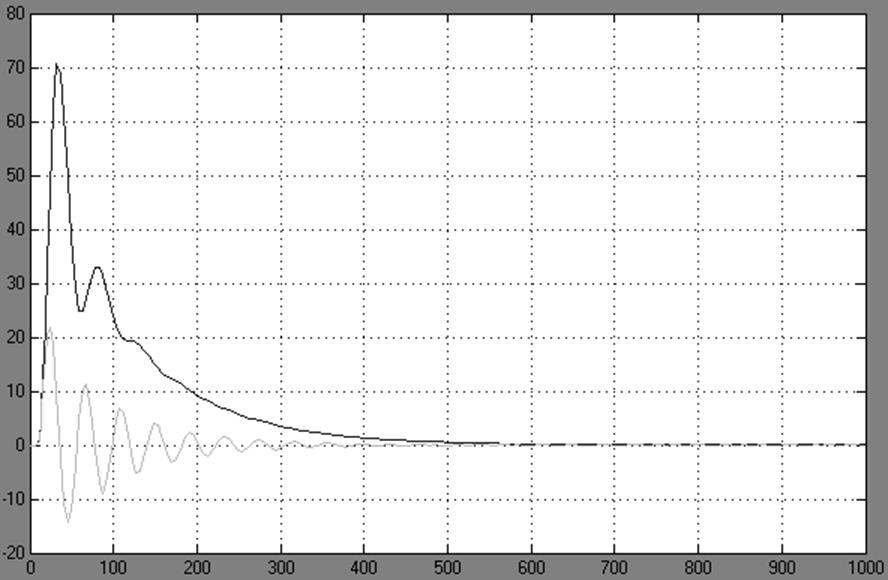
Рисунок 7.10 - Процесс регулирования ПИ-регулятора и каскадной АСР .
В курсовом проекте проанализирована существующая система управления процессом получения спирта. На основе анализа рассмотрены недостатки системы управления и возможная модернизация, позволяющая устранить недостатки. Проведен расчет настроек основного и вспомогательного регуляторов каскадной АСР.
1 Проектирование систем автоматизации: Методические указания по курсовому проектированию для студентов специальности 21 0200 всех форм обучения. – Красноярск: СибГТУ, 1999. – 60 с.
2 Технологический регламент: Брагоректификационного отделения спиртового производства, 1994г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.