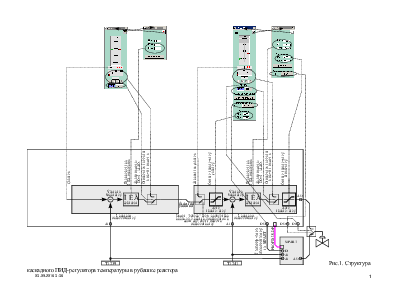
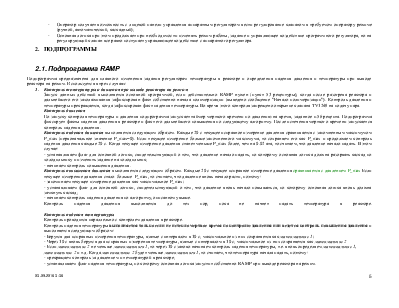
 Рис.1. Структура каскадного
ПИД-регулятора температуры в рубашке реактора
Рис.1. Структура каскадного
ПИД-регулятора температуры в рубашке реактора
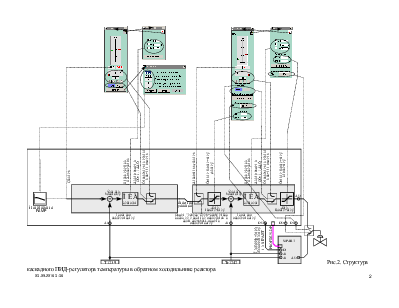
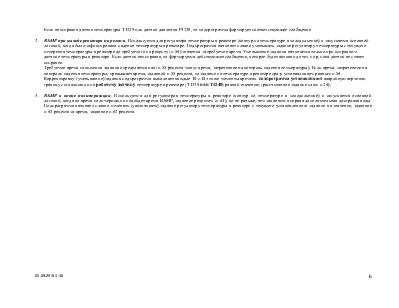
 Рис.2. Структура каскадного ПИД-регулятора
температуры в обратном холодильнике реактора
Рис.2. Структура каскадного ПИД-регулятора
температуры в обратном холодильнике реактора
– Подсистема регулирования состоит из четырех ПИД-регуляторов, образующих два каскада регулирования (Рис.1., Рис.2.);
– Управление ведущим и ведомым регуляторами (изменение режима работы и задания) разрешается всегда, независимо от того, в работе реактор или нет как с мнемосхемы "Состояние установки", так и из окон регуляторов;
– Для повышения надежности в системе предусмотрено резервирование регуляторов. Основным считается программный регулятор, резервным – аппаратный (SIPART DR22).
– Изменение коэффициентов аппаратного регулятора (коэффициент передачи, постоянная времени интегрирования и постоянная времени дифференцирования) в соответствии с настройками программного регулятора производится по нажатию кнопки "Применить" в окне настроек программного регулятора;
Структура программного регулятора приведена на Рис.1., Рис.2.
– Управление всеми четырьмя регуляторами реактора осуществляется из окон регуляторов или с мнемосхемы "Состояние установки". Внешний вид окон приведен на Рис.1., Рис.2.
– По каждому из четырех регуляторов
реактора существует индивидуальное окно, имеющее две формы: основную –
"окно управления регулятором" и вспомогательную – "окно настроек
регулятора". Переключение между этими формами производиться по нажатию
кнопок ![]() или
или ![]() в верхней правой области
окон.
в верхней правой области
окон.
– По нажатию кнопки "RAMP" (есть только на окне ведущего регулятора по холодильнику) открывается окно настройки и управления рэмпом (см. Рис.2.).
– Сам рэмп – это линейное изменение задания по температуре от значения "Начальное значение" до значения "Конечное значение" за время "Время перехода";
– Окно настройки и управления рэмпом предназначено для наблюдения за ходом рэмпа, а также предоставляет оператору возможность управления рэмпом;
– В исходном состоянии при неактивном рэмпе кнопка "Стоп" нажата, кнопки "Старт" и "Пауза" отжаты, кнопка "Пауза" недоступна, поля "Конечное значение" и "Время перехода" доступны для ввода, в поле "Начальное значение" отображается текущее значение температуры, в полях "Прошедшее время" и "Оставшееся время" – нуль;
– При активном рэмпе кнопки "Стоп" и "Пауза" отжаты, кнопки "Старт" нажата, кнопка "Пауза" доступна, все поля недоступны для ввода.
В поле "Начальное значение" отображается значение температуры, с которого было начато плавное изменение задания регулятора после нажатия кнопки "Старт" или запуска рэмп системой.
В поле "Конечное значение" отображается значение задания регулятора, которое будет установлено после завершения рэмпа.
В поле "Время перехода" отображается общее время рэмпа, в поле "Прошедшее время" – прошедшее время рэмпа, в поле "Оставшееся время" – оставшееся время рэмпа;
– По истечении времени "Время перехода" задание регулятора равно значению "Конечное значение", поля ввода и кнопки принимают исходное состояние;
– В системе существует возможность проведения рэмпа по команде оператора с настройками, заданными оператором;
– Перед запуском рэмпа оператор вводит требуемые значения в поля "Конечное значение" и "Время перехода";
– От начала фазы полимеризации до момента начала первой плановой дополнительной дозировки воды оператору в поле "Конечное значение" запрещено вводить значение большее, чем текущая температура в реакторе.
Если реактор в работе, до начала фазы полимеризации и от момента начала первой плановой дополнительной дозировки воды, поля ввода в окне настройки и управления рэмпом недоступны для ввода оператору, кнопки управления рэмпом недоступны для нажатия оператору.
Если реактор не в работе, поля ввода в окне настройки и управления рэмпом доступны для ввода оператору, кнопки управления рэмпом доступны для нажатия оператору;
– Для запуска рэмпа оператор нажимает кнопку "Старт", кнопка "Стоп" при этом отжимается";
– Во время рэмпа в поле вывода "Начальное значение" отображается значение температуры, с которого было начато плавное изменение задания регулятора после нажатия кнопки "Старт";
– Если во время проведения рэмпа требуется изменить его параметры (конечное значение или время перехода) необходимо нажать кнопку "Пауза". Кнопка "Старт" в этом случае остается нажатой, "Стоп" – отжатой, а поля ввода "Конечное значение" и "Время перехода" доступными для ввода. Изменение подпрограммой RAMP задания регулятора и отсчет прошедшего времени в поле "Прошедшее время" при этом будет временно приостановлено;
– После того, как новые параметры рэмпа введены в поля ввода, оператор отжимает кнопку "Пауза", автоматически пересчитывается значение в поле вывода "Оставшееся время" и возобновляется процесс плавного изменения задания с новыми параметрами и отсчет времени рэмпа в поле "Прошедшее время";
– Расчет нового значения в поле
"Оставшееся время" производиться следующим образом: ![]() . Если рэмп до нажатия кнопки
"Пауза" длился больше времени, чем ввели в поле "Время
перехода" во время паузы, то оставшееся время принимается равным нулю,
задание регулятора устанавливается равным значению в поле "Конечное
значение";
. Если рэмп до нажатия кнопки
"Пауза" длился больше времени, чем ввели в поле "Время
перехода" во время паузы, то оставшееся время принимается равным нулю,
задание регулятора устанавливается равным значению в поле "Конечное
значение";
– В двух случаях: по нажатию кнопки "Старт" и по отжатию кнопки "Пауза" производится установка задания ведущему регулятору в рубашке на один градус меньше чем "Конечное значение" рэмпа;
– Все четыре регулятора реактора имеют два режима работы: ручной и автоматический. В ручном режиме обратная связь разомкнута, ПИД-алгоритм не функционирует, оператор и система имеют возможность изменять управляющее воздействие на клапан. В автоматическом режиме обратная связь замкнута, работает ПИД-алгоритм, оператор и система имеют возможность изменять задание по температуре;
– Четыре регулятора реактора объединены в две каскадные схемы регулирования, в каждой из которых есть ведущий и ведомый регулятор. Каскад считается замкнутым, если ведомый и ведущий регуляторы находятся в автоматическом режиме;
– Ведущий регулятор не может находиться в автоматическом режиме управления, если ведомый находится в ручном режиме. Если оператор или система переключает ведомый регулятор в ручной режим, ведущий также переключится в ручной режим, каскад размыкается. Если оператор или система переключает ведомый регулятор в автоматический режим, режим ведущего не изменяется (остается в ручном), каскад остается не замкнутым. Ведущий регулятор можно переключить в автоматический режим только если ведомый находиться в автоматическом режиме;
– При включении ведущего регулятора в автоматический режим обеспечивается безударность замыкания каскада путем предустановки управляющего воздействия ведущего регулятора равного заданию ведомого регулятора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.