Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Сибирский Государственный Технологический Университет
Факультет автоматизации и информационных технологий
Кафедра прикладной механики
Расчет преобразователя следящего привода
Пояснительная записка
(ПМ.000000.009.ПЗ)
Руководитель:
_____________Пантилеев А.С.
(подпись)
_____________________________
(оценка, дата)
Выполнил:
Студент группы 23-1
_____________Миронов К.А.
(подпись)
_____________________________
(дата)
Красноярск 2005
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Сибирский Государственный Технологический Университет
Факультет автоматизации и информационных технологий
ЗАДАНИЕ
к расчетно-графической работе
Тема: «Расчет преобразователя следящего привода»
Студент: Миронов К.А. гр. 23-1
Дата выдачи: 2005 г.
Срок выполнения: 2005 г.
Руководитель: Пантилеев А.С.
Задание
1. Составить структурную схему механической системы и определить для
нее общую передаточную функцию.
2. Выполнить кинематические расчеты механического привода.
3. Рассчитать наиболее нагруженную зубчатую передачу с помощью
вычислительной техники.
4. Выполнить прочностной расчет выходного валика.
5. Начертить пространственную кинематическую схему системы.
Исходные данные:
- период одного цикла – 0,8 с;
- число фиксированных положений – 4;
- момент на валу кулачков – 600Н·мм;
- число кулачков – 4;
- исполнение механизма – закр.;
- редуктор двигателя – волн. ВЖ.
Кулачковый механизм:
- вид механизма – 2;
- наибольший ход выходного звена – 10 мм., град.;
- угол удаления – 100 град.;
- угол возвращения – 100 град.;
- угол дальнего выстоя – 40 град.;
- эксцентриситет - 5 мм;
- угол удаления – 30 град.;
- закон ускорения – 2.
Руководитель:
______________________________
(подпись)
Задание принял к исполнению:
______________________________
(подпись)
Реферат
В данной расчетно-графической работе составлена структурная схема механической системы, определена ее общую передаточная функция. Выполнены кинематические расчеты механического привода. С помощью вычислительной техники рассчитана наиболее нагруженная зубчатая передача. Выполнен прочностной расчет выходного валика. Начерчена пространственная кинематическая схема системы.
Расчетно-графическая работа содержит пояснительную записку, состоящую из 17 листов текста, 7 рисунков, 3 таблиц, 2 литературных источников.
Содержание
Введение………… ……………………..…………………………………………5
1 Составление структурной схемы и передаточной функции ……………...…6
2 Кинематический расчет механического привода………..……………………7
3 Прочностной расчет передач зацепления…………………………………..10
4 Расчет прочностных валов ……………………………………………………12
4.1 Составление расчетной схемы вала ………………………………………..12
4.2 Определение нагрузок, действующих в расчетной схеме ………………..13
Заключениие ……….…………………………………………………...……….16
Список использованных источников ………………………………..…………17
В современном машиностроении, приборостроении и системах
автоматизации постепенно стирается грань между отдельными видами приборов:
механическими, электрическими, оптическими и др. Уже сейчас нельзя говорить
только о технических, или только об электрических приборах: прибор должен
решать комплексную задачу, и принцип его действия нередко основан одновременно
на
нескольких законах физики.
Поскольку существенной частью многих автоматических систем и приборов являются механические системы, то при их разработке большое значение имеют знания в области расчета и конструирования узлов и деталей таких систем.
1 Структурная схема механической системы
Структурную схему составляем по схеме представленной на рисунке 1.
 |
Рисунок 1 – Механизм переключателя программ автоматической системы
Структурная схема системы представлена на рисунке 2.
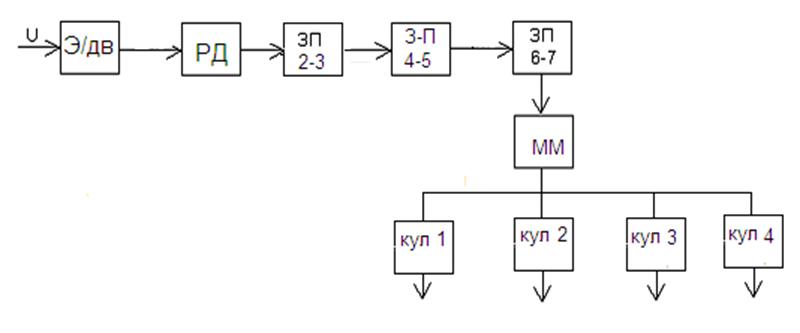 |
Рисунок 2 – Структурная схема механической системы
2 Кинематический расчет механического привода
Выходная мощность Рвых , Вт, рассчитывается по формуле
Рвых=Твых∙Wвых, (1)
где Твых – крутящий момент на выходном валу, Н∙м;
Wвых – скорость вращения выходного вала, об/мин.
Wвых=(π*n)/30 (2)
где n – обороты выходного вала, об/мин.
 ,
,
где ![]() – период одного цикла, с.
– период одного цикла, с.
![]() – число положений.
– число положений.
По формуле 1 и 2:
 Вт
Вт
Полезная мощность Рпол, Вт, рассчитывается по формуле
Рпол=Рвых+Рконтроль , (3)
где Рвых – выходная мощность, Вт;
Рконтроль – мощность контрольной системы, Вт.
Мощность контрольной системы, Вт, рассчитывается по формуле
Рконтроль= (0,01÷0,05)Рвых, (4)
Рконтроль= 0,04∙1,178=0,04712 Вт.
Рпол=1,178 + 0,0471 =1,225 Вт.
Номинальная мощность рассчитывается по формуле
 ,
(5)
,
(5)
где Рпол – полезная мощность, Вт;
ηобщ – общий КПД привода.
Общий КПД привода рассчитывается по формуле
![]() ,
(6)
,
(6)
где ![]() – КПД зубчатых
передач;
– КПД зубчатых
передач;
![]() – КПД опор;
– КПД опор;
![]() – КПД мальтийского
механизма;
– КПД мальтийского
механизма;
![]() – КПД редуктора;
– КПД редуктора;
n – количество зубчатых передач.
ηобщ=![]()
 Вт.
Вт.
Мощность двигателя, Вт, рассчитывается по формуле
Рдв=(2÷3)Рном, (7)
Рдв=(2÷3)2,3=(4,6÷6,9) Вт.
Выбираем двигатель типа АДП-507Б .
Номинальная мощность двигателя 7 Вт.
Номинальные обороты двигателя 1000 об/мин.
Общее передаточное отношение находится по формуле
 ,
(8)
,
(8)
где nдв – номинальные обороты двигателя, об/мин;
nвых – скорость вращения выходного вала, об/мин.
 .
.
Общее передаточное состоит из передаточных отношений отдельных звеньев.
![]() ,
(9)
,
(9)
где i2-3 - передаточное отношение зубчатой передачи 2-3;
i4-5 - передаточное отношение зубчатой передачи 4-5;
i6-7. - передаточное отношение зубчатой передачи 6-7;
iред. - передаточное отношение редуктора.
Передаточное отношение редуктора iред принимаем равным 30.
Из формулы 9:
По номограмме определяем
iЗП2-3=1,3
iЗП4-5 = 1,3
Таблица 1 – Результаты кинематического расчета
|
Параметры |
1 |
2 |
3 |
4 |
|
n, об/мин |
33,34 |
25,643 |
19,725 |
18,75 |
|
Т, Н∙м |
84,37 |
109,68 |
142,58 |
150 |
3 Прочностной расчет передач зацепления
Задача расчета: проектируем зубчатую цилиндрическую передачу с помощью ЭВМ и производим геометрический расчёт остальных зубчатых передач.
Исходные данные:
Крутящий момент на колесе Т2,Н×м: 0,15
Обороты выходного вала n2,об/мин: 18,75
Передаточное числоU: 1,05
Общее время работы передачи Lh,ч: 20000.00
Передача реверсивная
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.