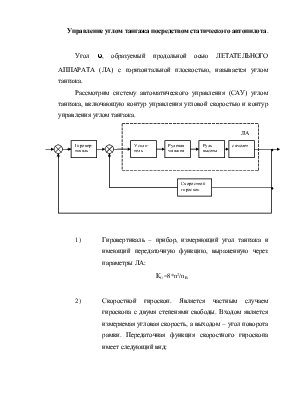





Угол u, образуемый продольной осью ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) с горизонтальной плоскостью, называется углом тангажа.
Рассмотрим систему автоматического управления (САУ) углом тангажа, включающую контур управления угловой скоростью и контур управления углом тангажа.
1) Гировертикаль – прибор, измеряющий угол тангажа и имеющий передаточную функцию, выраженную через параметры ЛА:
Кu=8*n2/nB
2) Скоростной гироскоп. Является частным случаем гироскопа с двумя степенями свободы. Входом является измеряемая угловая скорость, а выходом – угол поворота рамки. Передаточная функция скоростного гироскопа имеет следующий вид:
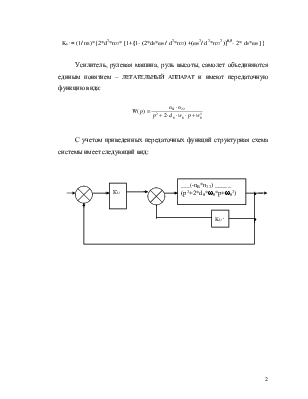
Ku¢ = (1/ nB)*{2*d2*n22* [1+{1- (2*d0*w0 / d2*n22) +(w02/ d2*n222 )}0,5- 2* d0*w0 ]}
Усилитель, рулевая машина, руль высоты, самолет объединяются единым понятием – ЛЕТАТЕЛЬНЫЙ АППАРАТ и имеют передаточную функцию вида:
 |
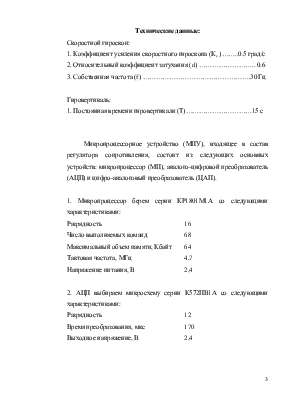
Технические данные:
Скоростной гироскоп:
1. Коэффициент усиления скоростного гироскопа (Кс )……..0.5 град/с
2. Относительный коэффициент затухания (d) …………………….. 0.6
3. Собственная частота (f) ………………………………………….30 Гц
Гировертикаль:
1. Постоянная времени гировертикали (Т)…………………………15 с
Микропроцессорное устройство (МПУ), входящее в состав регулятора сопротивления, состоит из следующих основных устройств: микропроцессор (МП), аналого-цифровой преобразователь (АЦП) и цифро-аналоговый преобразователь (ЦАП).
1. Микропроцессор берем серии КР1801М1А со следующими характеристиками:
Разрядность 16
Число выполняемых команд 68
Максимальный объем памяти, Кбайт 64
Тактовая частота, МГц 4,7
Напряжение питания, В 2,4
2. АЦП выбираем микросхему серии К572ПВ1А со следующими характеристиками:
Разрядность 12
Время преобразования, мкс 170
Выходное напряжение, В 2,4
Входное напряжение, В 5
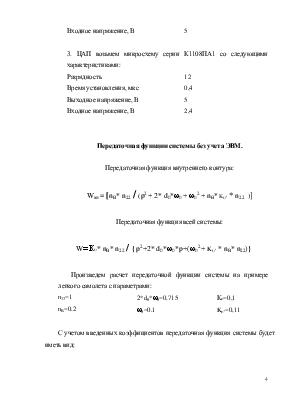
3. ЦАП возьмем микросхему серии К1108ПА1 со следующими характеристиками:
Разрядность 12
Время установления, мкс 0,4
Выходное напряжение, В 5
Входное напряжение, В 2,4
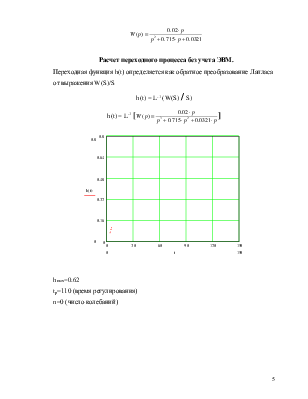
Передаточная функции системы без учета ЭВМ.
Передаточная функция внутреннего контура:
Wвн = [nB* n22 /(p2 + 2* d0*w0 + w02 + nB* Ku¢ * n22 )]
Передаточная функция всей системы:
Произведем расчет передаточной функции системы на примере легкого самолета с параметрами:
n22=1
nB=0.2
2*d0*w0=0.715
w0=0.1
Кu=0,1
Ku¢=0,11
С учетом введенных коэффициентов передаточная функция системы будет иметь вид:
Переходная функция h(t) определяется как обратное преобразование Лапласа от выражения W(S)/S
h(t) = L-1 (W(S) / S)
h(t) = L-1 [ ]
]
hmax=0.62
tp=110 (время регулирования)
n=0 (число колебаний)
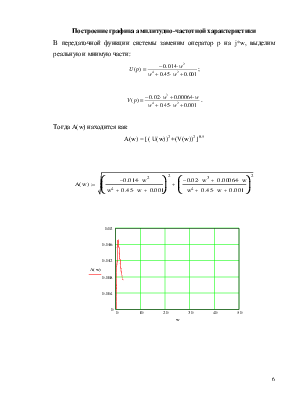
Построение графика амплитудно-частотной характеристики
В передаточной функции системы заменим оператор р на j*w, выделим реальную и мнимую части:
 ;
;
 .
.
Тогда A(w) находится как
A(w) = [( U(w))2 +(V(w))2 ]0.5
Определим показатели качества по графику АЧХ:
1. А(w)max=0.017
2. А(0)=0
w {0.5;1,8}
Расчет передаточной функции и переходного процесса с ЭВМ.
 |
Определим дискретную передаточную
функцию непрерывной части системы, когда непрерывная часть системы имеет
передаточную функцию: 
Для этого проведем Z преобразование:
где k – отношение цены разрядов ЦАП к АЦП.
Для простоты перехода к функции W(z) функцию непрерывной части системы разложим на элементарные дроби:

Z-преобразование проведем по следующим формулам:
 , где
, где  ;
;
Таким образом 
Далее проведем замену 
где ![]() ,
, ![]() -
псевдочастота.
-
псевдочастота.
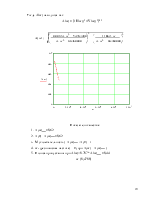
Построим переходный процесс h1(t) для передаточной функции ![]() :
:
для этого воспользуемся обратным преобразованием Лапласа:  .
.
h(t)=0.6-0.62*exp(-4702.35*t)
hmax = 0.62
tp = 0.00110
n = 0
Построение графика АЧХ для системы управления с ЭВМ.
В передаточной функции системы заменим оператор р на j*w, выделим реальную и мнимую части:
 ;
;
 .
.
Тогда A(w) находится как
A(w) = [( U(w))2 +(V(w))2 ]0.5
Показатели качества:
1. А(w)max=0,62
2. А(0)= А(w)max=0,62
w {0;4700}
Вывод:
Показатели качества системы управления
Без ЭВМ
1. hmax=0.62
2. tp=110
3. n=0
4. А(w)max=0.017
5. А(0)=0
С ЭВМ
1. hmax = 0.62
2. tp = 0.00110
3. n = 0
4. А(w)max=0,62
5. А(0)= А(w)max=0,62
Анализ полученных графиков переходных процессов с ЭВМ и без ЭВМ показывает, что введение в систему ЭВМ значительно улучшило качество системы. Это характеризуют, в частности, следующие показатели качества:
Время регулирования tp уменьшилось в 100000 раз;
Показатель колебательности М уменьшился от бесконечности до 1;
Значительно увеличилась полоса пропускания w.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.