где ![]()
Для усилителя Z – преобразование равно:
![]() (20)
(20)
Для ДПТ Z – преобразование равно:
 (21)
(21)
Для редуктора Z – преобразование равно:
![]() (22)
(22)
Для ХР Z – преобразование равно:
 (23)
(23)
Для термопары:
 (24)
(24)
Для использования в расчете метода логарифмических характеристик необходимо осуществить w - преобразования, для этого необходимо воспользоваться формулой:
 (25)
(25)
подставим выражение (15) в формулу (9) и получим
 (26)
(26)
Перейдем от w - изображения к частотному выражению передаточной функции, для этого воспользуемся подстановкой:
 (27)
(27)
где Т0 – период дискретного повторения, Т0 = 0,003 мин;
l - псевдочастота, мин-1.
Тогда с учетом этой формулы выражение (16) примет вид:
Преобразуем данное выражение, подставляя значения Т0 и получим формулу:

3.3. Исследование системы на устойчивость и ее анализ
Для определения устойчивости системы построим переходный характеристику разомкнутой системы, для этого передаточную функцию разомкнутой системы подвергнем обратному преобразованию Лапласа, чтобы перейти от оператора р к параметру времени t.
Передаточная функция разомкнутой системы равна:

проведем преобразование и получим:
 (28)
(28)
По полученному значению строим график, который изображен на рисунке 5.
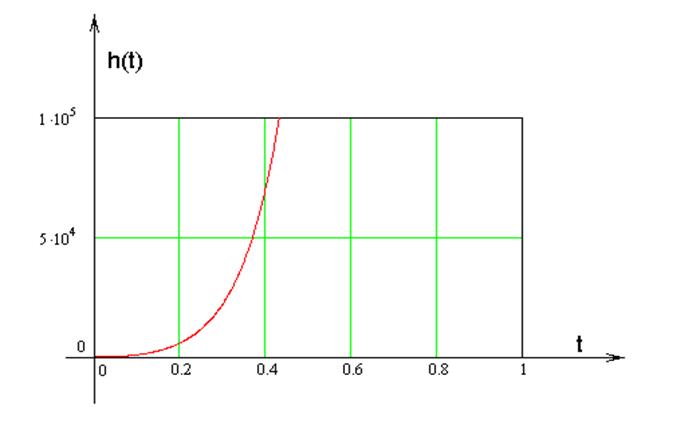
Рисунок 5 – Переходная характеристика системы
Определим качество системы:
Из графика видно, что данная система является неустойчивой.
Поэтому зададимся параметрами которой должна обладать новая скорректированная система:
- перерегулирование s=20%-30%
- время перегулирование должно быть не больше tp=1,5 с.
4. Построения ЛАЧХ И ЛФЧХ системы
Для того, чтобы построить ЛАЧХ системы запишем передаточную функцию системы через псевдочастоты:
С помощью программы Mathcad построим по заданной передаточной функции ЛАЧХ и ЛФЧХ. График ЛАЧХ изображен на рисунке 6, а график ЛФЧХ – на рисунке 7.
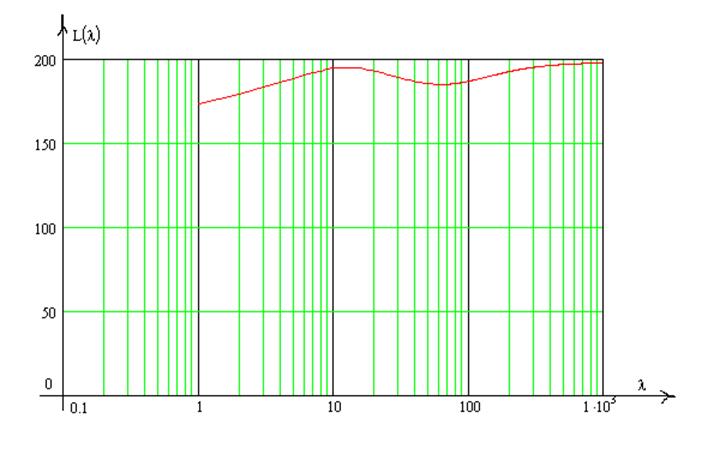
Рисунок 6 – ЛАЧХ системы.
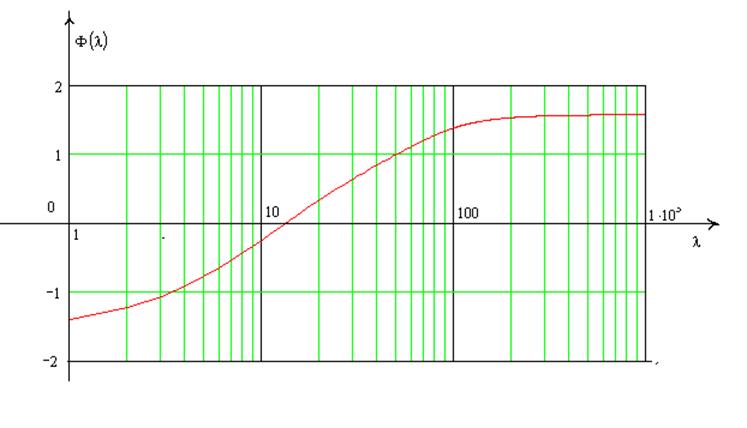
Рисунок 7 – ЛФЧХ системы.
5. Построения желаемой ЛАЧХ системы
Желаемую ЛАЧХ разделяют на три части: низкочастотную, среднечастотную и высокочастотную составляющие. Низкочастотная часть определяет статическую точность системы – точность в установившихся режимах.
Среднечастотная является наиболее важной, так как она определяет устойчивость, а следовательно качество переходных процессов.
После построения переходной характеристики системы мы задались следующими параметрами для вычисления корректирующего устройства.
- перерегулирование s=25%
- время перегулирование должно быть не больше tp=1,5 с.
По номограмме Солодовникова [4] находим частоту среза из s=25%
1) найдем частоту среза по формуле
 (29)
(29)
где К - коэффициент, определяемый из данной номограммы.
При заданном значении перерегулирования данный коэффициент равен:
К=0,5
Тогда частота среза равна
![]() (30)
(30)
2) определяем среднечастотную область, для этого находим частоты, ограничивающие эту область, которая является рабочей.
![]() (31)
(31)
найдем коэффициент а2 по номограмме:
![]() (32)
(32)
тогда частоты равны:
![]() (33)
(33)
![]() (34)
(34)
3)
через
частоты ![]() и
и ![]() проводим
вертикальные асимптоты, а затем через частоту среза
проводим
вертикальные асимптоты, а затем через частоту среза ![]() проводим
линию с наклоном (-20 дБ/дек).
проводим
линию с наклоном (-20 дБ/дек).
4) Построим желаемую ЛАЧХ на одном графике с ЛАЧХ системы (смотри рисунок 8).
Рисунок 8 – Желаемая ЛАЧХ.
6. Корректирующее устройство
Построим ЛАЧХ корректирующего устройства
![]() (35)
(35)
Согласно построенному графику (8) проводим синтез корректирующего устройства. ЛАЧХ корректирующего устройства и ЛАЧХ желаемая, ЛАЧХ системы изображены на рисунке 9.
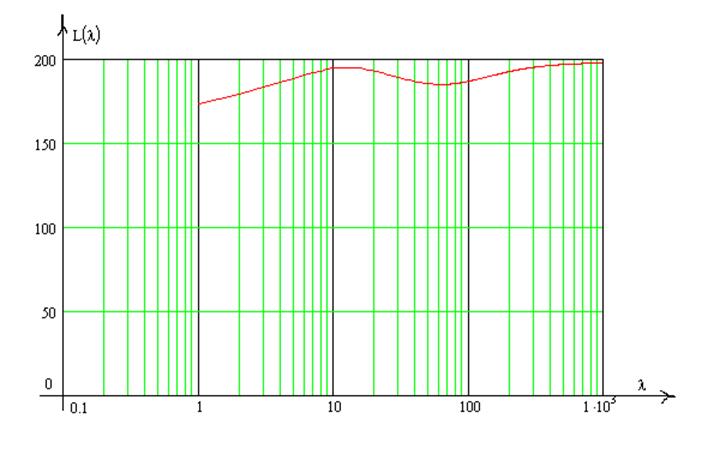
Рисунок 9 – ЛАЧХ корректирующего устройства.
7. Построение переходной характеристики скорректированной системы
Для проверки правильности выбранного корректирующего устройства необходимо включить последовательно после микропроцессора корректирующее устройство – это позволит добиться необходимых параметров и сделать систему более устойчивой.
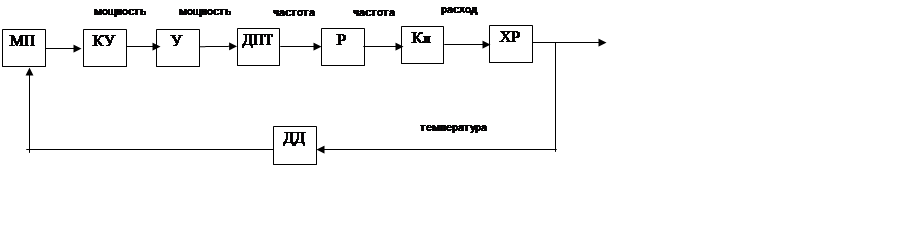 |
Рисунок 10 – Функциональная схема с корректирующим устройством.
При анализе рисунка 9 найдена передаточная функция корректирующего устройства, преобразовав ее обратно от псевдочастоты к оператору р получим:
![]() (36)
(36)
Теперь найдем передаточную функцию разомкнутой системы:
 (37)
(37)
Данную передаточную функцию преобразуем с помощью преобразования Лапласа в переходную характеристику. Построим переходную характеристику (смотри рисунок 11).
![]()
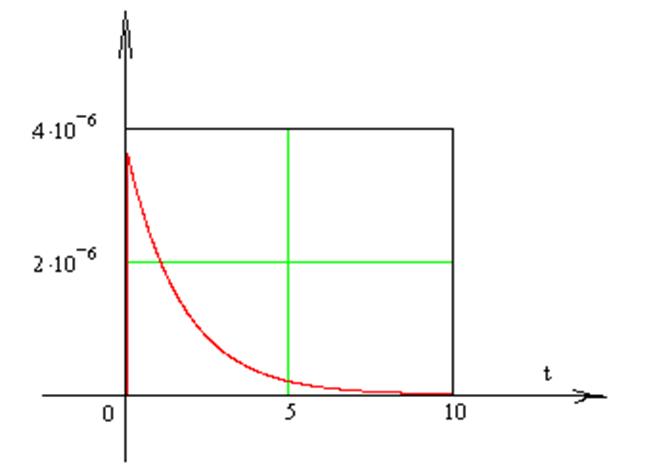
Рисунок 11 – Переходная характеристика скорректированной системы.
Качество системы определяем из построенного графика:
- установившаяся ошибка:
![]()
- установившееся значение переходного процесса:
![]()
- время переходного процесса:
![]()
- перерегулирования:
![]()
8. Построение ФЧХ скорректированной системы
На основании ее построим ФЧХ
 (34)
(34)
ФЧХ приведена на рисунке 11.
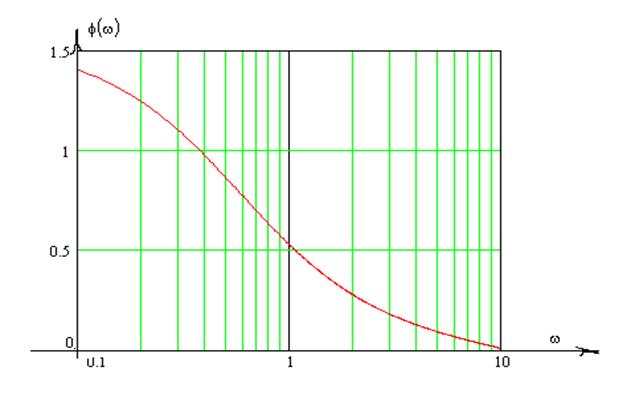
Рисунок 11 – ЛФЧХ скорректированной системы.
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте разрабатывалась система регулирования температуры в химическом реакторе. Для точного управления был применен микропроцессор.
По анализу переходной функции разомкнутой системы было выявлено, что система является неустойчивой. Для улучшения качества системы было рассчитано корректирующее устройство, которое стабилизировало работу системы, то есть улучшило качество системы.
1. Микропроцессоры и микроЭВМ в САУ: Справочник./ Под ред. Хвощ С. Т. – Л.: Машиностроение, 1987 г. . – 640 с., ил.
2. Воронов А. А. Основы теории автоматического регулирования и управления: учебное пособие для вузов. – М.: Высшая школа, 1977. – 519 с, ил.
3. Автоматические приборы, регуляторы и вычислительные системы.: Справочник / Под ред. Кошарского Б. Д. – Л.: Машиностроение, 1976. – 488 с, ил.
4. Топчеев Ю. И. Атлас для проектирования систем автоматического регулирования: Учеб. пособие для вузов. – М.: Машиностроение, 1989. – 754 с., ил.
5. Справочник по математике для инженеров и учащихся втузов / Под ред. Бронштейна И. Н. – М.: Изд-во «Наука», 1986. – 544 с., ил.
ПРИЛОЖЕНИЕ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.