3.1 К неизменяемой части относятся устройства, параметры которых физически изменить невозможно ,к изменяемой – те устройства передаточная функция которых может изменятся..
В неизменяемую часть системы в общем случае вхдят: 1) исполнительные органы;
2)усилители мощности;
3) измерительные средства (датчики);
В изменяемую часть системы в общем случае входят:
1) электронные усилители;
2) микропроцессоры;
3) преобразователи;
4) устройства компенсации сигналов;
5) устройства коррекции динамических характеристик.
По этой причине в данной системе к изменяемой части можно отнести задающее устройство, представленное микропроцессором, а к неизменяемой - все остальные элементы схемы, а именно: регулирующее устройство, усилитель, двигатель и редуктор.
Для получения передаточной функции неизменяемой части нужно произвести размыкание системы электропривода, для чего необходимо преобразовать структурную схему так, чтобы получить единичную обратную связь. Размыкание системы выполняется разрывом обратной связи. Это делается для уменьшение ошибки системы. В следящих электроприводах обратная связь по выходному углу единичная, поэтому нет необходимости в преобразовании структуры системы.
Разорвав цепь обратной связи передаточную функцию неизменяемой части исходя из выражения ( ) , можно записать в виде:
 |
где К = 11,02- коэффициент усиления системы,
3.2 Логарифмическую амплитудно-частотную характеристику (ЛАЧХ) неизменяемой части будем строить с помощью Z- пеобразования.
Заменим p на s и домножим на1/s получим:
 |
Запишем Z-преобразование для дискретной функции:
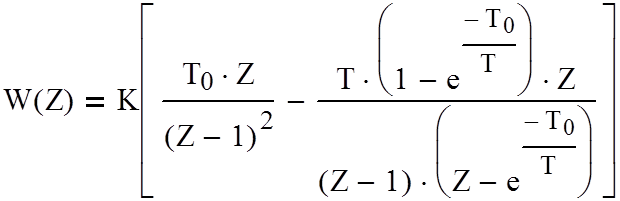 |
 |
Получим:
 |
 |
 |
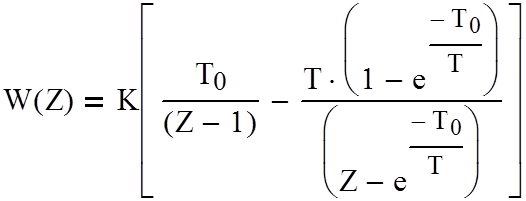
Сделаем упрощение функции и подставим значения;
То=0,003 – постоянная времени МП (время занятости), с.
Т=0.038
K=11.02
 |
Произведем замену:
 |
 |
 |
 |
4. ЖЕЛАЕМАЯ ЛАЧХ
Построение желаемой ЛАЧХ.
Чтобы определить данные, необходимые для построения желаемой ЛАЧХ -частоту среза и показатель колебательности, нужно построить амплитудно-частотную характеристику (АЧХ) реальной системы, а, следовательно. неизменяемой части. Улучшив полученные значения, можно определить частоту среза и показатель колебательности желаемой ЛАЧХ.
Для этого нужно воспользоваться выражением ( ), которое представляет собой передаточную функцию системы в операторной форме.
 |
 |
С учетом того, что j =-1. преобразованная функция будет иметь вид:
 |
 |
После раскрытия скобок и приведения подобных слагаемых в числителе и знаменателе, передаточная функция имеет вид:
 |
Передаточную функцию выражения ( ) необходимо разделить на вещественную U (w) и мнимую V (w) части, выражение примет вид:
 |
Выражение для АЧХ записано в виде:
 |
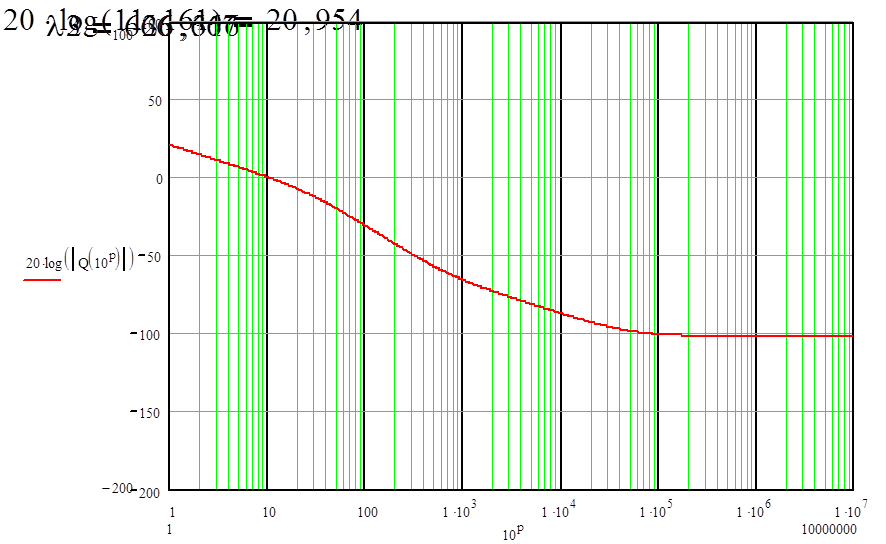
По полученному выражению ( ) следует построить АЧХ системы (рис. ).
Для построения среднечастотной области нужно определить частоту среза - это частота, получаемая при А(w)=1. Из графика видно, что значение частоты среза = рад/с.
Для построения желаемой ЛАЧХ необходимо улучшить качество переходного процесса реальной системы. Частота среза косвенно характеризует этот параметр:чем меньше частота среза, тем хуже быстродействие системы.
Показатель колебательности М определяется по формуле:
 |
Где Аmах ( ) - это максимум АЧХ;
А(0) - значение АЧХ в точке со=0.
Из графика А( ) видно, что Аmax=A(0).Таким образом М=1
В реальной системе колебательность не может быть равной единице, в силу возможных погрешностей. Для системы автоматики М=1,1…1,5 поэтому для нашей системы примем М=1,1.
Определяем верхние и нижние границы ЖЛАЧХ с наклоном минус 20 дб/ дек.
 |
 |
Где -частота среза равная равная частоте среза ЛАЧХ
ЖЛАЧХ должна пересекать ось 0 дб/ дек между и и наклон ее между этими границами должен быть равен минус 20 дб/дек , для обеспечения хорошего качества регулирования. В низкочастотной и высокочастотной части ЖЛАЧХ и ЛАЧХ должны совпадать.
Данная система обладает ЛАЧХ, удовлетворяющей этому требованию и поэтому в дополнительной коррекции не нуждается.
Содержание :
|
Введение |
|
1-Техническое задание |
|
2-Выбор элементов |
|
2.1 Задающее устройство |
|
2.2 Регулирующее устройство |
|
2.3 Усилитель |
|
2.4 Исполнительный механизм |
|
2.5 Редуктор |
|
3 Построение ЛАЧХ |
|
3.1Деление системы на изменяемую и не изменяемую части |
|
3.2 Построение ЛАЧХ с помощью Z-преобразования |
|
3.3 Анализ устой чивости |
|
4 Построение ЖЛАЧХ |
|
5 Заключение |
|
6 Список используемой литературы |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.