% Эта S-функциЯ осуществлЯет дискретные уравнениЯ в форме:
% x(n+1) = Ax(n) + Bu(n)
% y(n) = Cx(n) + Du(n)
%
% Генерировать дискретную линейную систему:
A=[-1.3839 -0.5097
1.0000 0];
B=[-2.5559 0
0 4.2382];
C=[ 0 2.0761
0 7.7891];
D=[ -0.8141 -2.9334
1.2426 0];
switch flag,
case 0
[sys,x0,str,ts] = mdlInitializeSizes(A,B,C,D); % ИНИЦИАЛИЗАЦИЯ
case 2
sys = mdlUpdate(t,x,u,A,B,C,D); % МОДИФИЦИРОВАТЬ ДИСКРЕТНЫЕ СОСТОЯНИЯ
case 3
sys = mdlOutputs(t,x,u,A,B,C,D); % ВЫЧИСЛИТЬ ВЫХОДЫ
case 9 % Неиспользованные флажки
sys = [];
otherwise
error(['unhandled flag = ',num2str(flag)]); % Обработка ошибок
end
% Конец dsfunc.
%==============================================================
% ИнициализациЯ
%==============================================================
function [sys,x0,str,ts] = mdlInitializeSizes(A,B,C,D)
% Вызвать simsizes длЯ структуры размеров, заполнить её, и конвертировать{преобразовать}
% к массиву размеров.
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 2;
sizes.NumOutputs = 2;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1; % Матрица D непуста.
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = ones(2,1); % Инициализировать дискретные состоЯниЯ.
str = []; % ПриравнЯем str пустой матрице.
ts = [1 0]; % период дискретизации и смещение
% Конец mdlInitializeSizes.
%==============================================================
% Модифицировать дискретные состоЯниЯ
%==============================================================
function sys = mdlUpdate(t,x,u,A,B,C,D)
sys = A*x + B*u;
% Конец mdlUpdate.
%==============================================================
% Вычислить выходы
%==============================================================
function sys = mdlOutputs(t,x,u,A,B,C,D)
sys = C*x + D*u;
% Конец mdlOutputs.
Вышеприведенный пример соответствует стадиям моделирования, обсужденным ранее . Системные дискретные уравнения состояния имеют форму
x(n+1) = Ax(n) + Bu(n)
y(n) = Cx(n) + Du(n)
так, чтобы очень общие наборы разностных уравнений могли быть смоделированы, используя dsfunc.m. Это подобно встроенному блоку Discrete State-Space. Вы можете использовать dsfunc.m как отправная точка для моделирования дискретные системы пространства состояний с изменяющимися во времни коэффициентами.
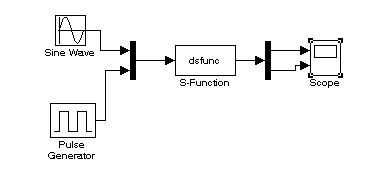
Рис. Модель в Simulink.
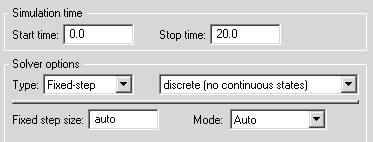
Рис. Параметры моделирования.
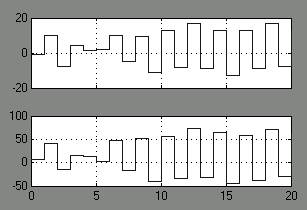
Рис. Результаты моделирования.
Simulink включает функцию, названную mixedm.m, который является примером гибридной системы (комбинация непрерывных и дискретных состояний) смоделированный в S-функции. Обработка гибридных систем является довольно прямой; параметр флажка вынуждает вызовы к правильной подпрограмме S-функции для непрерывных и дискретных частей системы. Одна тонкость гибридных S-функций - то, что Simulink вызывает mdlUpdate, mdlOutput, и mdlGetTimeOfNextVarHit подпрограммы во все время сэмплирования. Это означает, что в этих подпрограммах Вы должны проверить, чтобы определить, какой момент времени выборки обрабатывается и только исполнять обновления, которые соответствуют тому моменту времени выборки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.